Глава 3. Разработка алгоритмов формирования и обработки сигналов
3.1. Алгоритм формирования сигнала
Передающая часть многоканальной системы связи с ЧРК, как правило, содержит две ступени модуляции: в первой – поднесущие колебания модулируются передаваемыми сообщениями; во второй – несущая частота передатчика модулируется суммой модулированных поднесущих, то есть групповым сигналом. Общая схема образования модулированных колебаний представлена на рисунке 10.
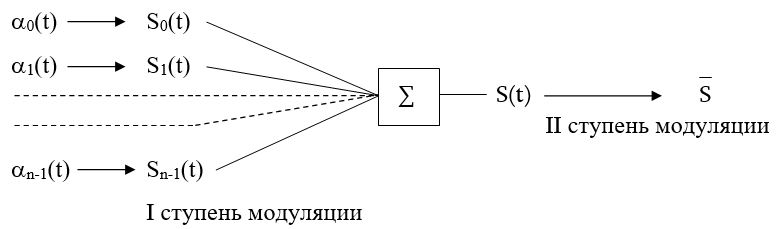
На рисунке 10 следующие обозначения:
S – высокочастотный сигнал;
a0(t), a1(t),…, an-1(t) – символы сообщений;
S0(t), S1(t),…, Sn-1(t) – модулированные поднесущие;
S(t) – групповой сигнал.
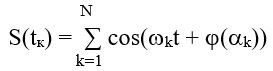
Для формирования информационного сигнала, являющегося переносчиком a0, a1,…, an-1 символов сообщения, воспользуемся цифровыми методами синтеза сигналов. Фаза каждого k-го из передаваемых колебаний зависит от ak:
Представим выражение для вектора отсчетов группового сигнала в комплексной форме:
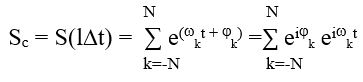
где Dt – шаг дискретизации, который выбирается в соответствии с теоремой Котельникова.
Тогда вектор Uk = eijk , представляет собой совокупность спектральных коэффициентов формируемого сигнала.
Для решения этой задачи необходим значительный объем вычислений операций сложения и умножения, поэтому вектор отсчетов сформированного сигнала более экономично получить в виде дискретного преобразования Фурье вектора спектральных коэффициентов, реализуемое в соответствии с алгоритмом быстрого преобразования Фурье (БПФ). Дискретное преобразование Фурье является линейным преобразованием, которое переводит вектор временных отсчётов в вектор спектральных отсчётов той же длины и наоборот. Таким образом, дискретное преобразование Фурье может быть реализовано как умножение квадратной матрицы на вектор, и тогда вектор временных отсчетов группового сигнала можно записать в виде:
S = ФUк , где Ф – матрица дискретного преобразования.
Сформированные отсчеты подаются на ЦАП, выход которого поступает на вход возбудителя передатчика.
Рассмотрим принципы АЦП и ЦАП преобразования. Физические сигналы являются непрерывными функциями времени. Чтобы преобразовать непрерывный, в частности, аналоговый сигнал в цифровую форму используются аналого-цифровые преобразователи (АЦП). Процедуру аналого-цифрового преобразования сигнала обычно представляют в виде последовательности трех операций: дискретизации, квантования и кодирования. Однако если придерживаться терминологии принятой в литературе по системам цифровой связи, то первая операция, дискретизация, соответствует модуляции сигнала, а вторая операция, квантование, есть ни что иное, как один из способов кодирования. Поэтому процедуру аналого-цифрового преобразования сигнала можно также представить в виде последовательности двух операций — модуляции и кодирования. Операция дискретизации заключается в определении выборки моментов времени измерения сигнала. Операция квантования состоит в считывании значений координаты сигнала в выбранные моменты измерения с заданным уровнем точности, а операция кодирования — в преобразовании полученных измерений сигнала в соответствующие значения некоторого цифрового кода или кодовой комбинации, которые затем передаются по каналам связи.
Процедуру восстановления непрерывного сигнала из цифрового представления также можно представить в виде двух операций: декодирования и демодуляции. Операция декодирования выполняет операцию обратную операции кодирования, т.е. преобразует последовательность заданных значений кодовой комбинации (кодовых слов) в последовательность измерений, следующих друг за другом через заданные интервалы времени дискретизации. Операция демодуляции выполняет интерполяцию или восстановление непрерывного сигнала по его измерениям. Преобразование сигнала из цифровой формы в непрерывный сигнал осуществляется цифро-аналоговыми преобразователями (ЦАП).
3.2. Алгоритм демодуляции
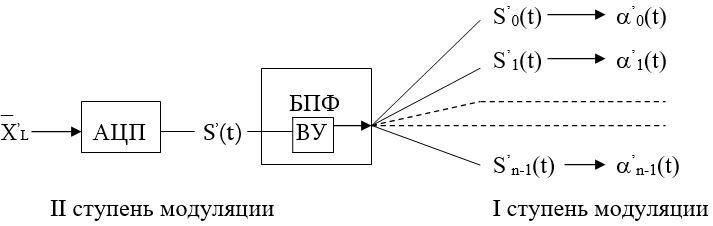
Приемная часть системы содержит две ступени демодуляции. Демодуляция принятого и усиленного сигнала позволяет выделить многоканальное сообщение. После разделения этого сообщения на отдельные модулированные поднесущие осуществляется их демодуляция канальными демодуляторами. В результате на выходе каналов появляются принятые канальные сообщения. Общая схема процесса демодуляции показана на рисунке 11, обозначения здесь применены те же, что и на рисунке 10, штрих показывает отличие соответствующих колебаний из-за действия помех.

Алгоритм демодуляции может быть реализован с помощью вычислительного устройства (ВУ) в цифровой форме с помощью быстрого преобразования Фурье (БПФ). Для этого в приведенную структуру введем АЦП, имеющий частоту дискретизации в соответствии с теоремой Котельникова.
3.3. Алгоритм тактовой синхронизации
Тактовая синхронизация – это процесс установления точного временного соответствия между принимаемым сигналом и последовательностью элементарных посылок.
В КВ-радиоканале имеет место многолучевое распространение, то есть, в точке приема наблюдается интерференция волн, являющихся отражением или преломлением излученной волны. Поэтому система связи, работающая в КВ-диапазоне радиоволн должна учитывать данный момент. В точку приема приходят отражения излученной волны со своей задержкой, определяющейся строением ионосферы в данный момент времени, которое невозможно заранее предсказать. Как следствие, волны складываются в разной фазе, и поэтому их сумма – это величина, также зависящая от задержек каждого из лучей. Особенно неоднородна картина, наблюдаемая на границах элементарных посылок, где происходит перекрывание волн с различными фазами. Проводить корректную обработку таких участков практически не удается. Поэтому такие участки сигнала, называемые защитным интервалом, исключаются из обработки. Продолжительность таких участков зависит от величины задержки лучей. Для того чтобы выяснить каков защитный интервал были использованы уже имеющиеся данные по характерным задержкам в КВ-диапазоне, а также были проведены исследования с целью определения реально наблюдаемых задержек. В результате анализа было установлено, что задержки больше 4 мс. являются довольно редким явлением. Поэтому делать защитный интервал длиннее 4 мс. нет особой необходимости.
Тактовая синхронизация в дипломной работе обеспечивается методом спектральной скользящей оценки сигнала. Допустим, возьмем сигнал, где происходит смена фаз на p, тогда делая скользящее спектральное разложение сигнала на длительности элементарной посылки, можно получить его коэффициенты, которые будут обладать определенной особенностью.
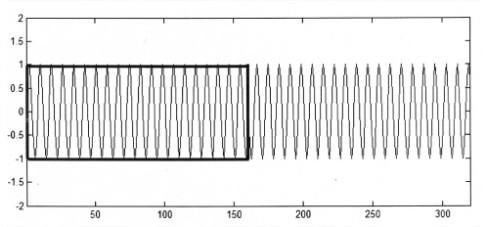
Для рассмотрения возьмем два характерных случая: когда начало окна спектрального разложения совпадает с началом элементарной посылки, и когда оно совпадает с серединой элементарной посылки. Так, для первого случая, изображенного на рисунке 13, коэффициенты будут максимальны.
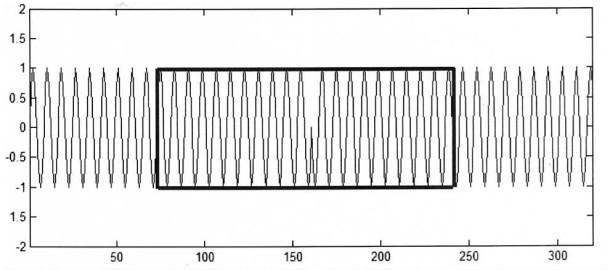
Во втором случае, изображенном на рисунке 14 коэффициенты при гармониках соответствующих частот, очевидно, будут стремиться к нулю.
На основе найденных коэффициентов построим функцию F по следующей формуле:
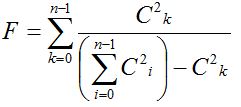
Где Ck — коэффициент k-ой гармоники, n — число задействованных гармоник для случая многоканальной передачи данных. При этом гармоники должны располагаться на удвоенном интервале ортогональности, чтобы функция обладала характерной особенностью.
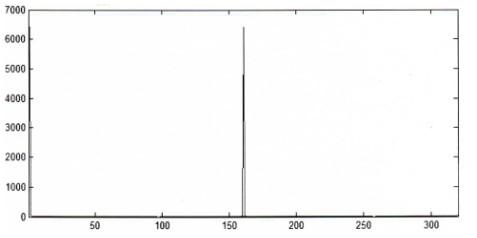
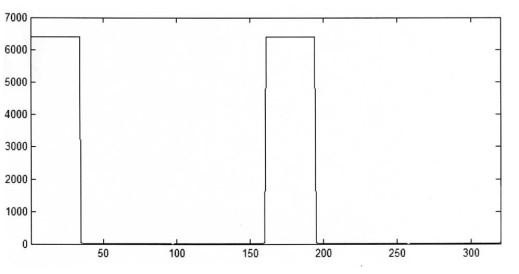
Локальный максимум данной функции соответствует началу посылки, так как на всем интервале спектрального разложения отсутствует смена фазы, а локальный минимум соответствует середине элементарной посылки, так как в этом случае смена фаз будет именно в середине интервала разложения. В идеальном случае для двух элементарных посылок функция F будет выглядеть, как показано на рисунке 15.
В случае с шумом, функция F исказится, а в случае, когда сигнал отсутствует и присутствует только шум, такая функция не будет иметь яркое выраженных минимумов или максимумов.
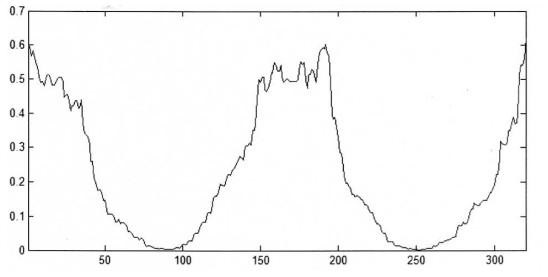
Когда скользящая оценка производиться не на всей длительности элементарной посылки, а на длительности, исключающей защитный интервал, при отсутствии шумов функция F будет выглядеть, как показано на рисунке 16.
В присутствии шумов функция F будет выглядеть, как показано на рисунке 17.
Осуществлять синхронизацию следует по положению максимумов полученной функции F на интервале элементарной посылки, так как они имеют меньшие флуктуации по сравнению с позициями минимумов.
Очевидно, что точно определить моменты смены фазы радиосигнала при анализе одной реализации элементарной посылки не представляется возможным. Поэтому необходимо накопить некоторую выборку из найденных максимумов, найденных на реализациях элементарных посылок и провести статистическое усреднение. Например, положение минимума можно определить как среднее значение выборки или как ее медианное значение. Такую синхронизацию можно осуществлять постоянно, компенсируя расхождение кварцевых генераторов, используемых в системе.
3.4. Алгоритм автоматической подстройки частоты
Автоматическая подстройка частоты обеспечивает совпадение частот входного сигнала и местного опорного колебания.
Рассмотрим случай многоканальной передачи данных по коротковолновому радиоканалу в режиме относительной фазовой манипуляции в полосе телефонного канала шириной F = 3100 Гц. Пусть длительность элементарной посылки сигнала:
Т=Та+Тз , где Тз — длительность защитного интервала, используемого для минимизации влияния многолучевого распространения в коротковолновом канале, Та — интервал анализа принимаемого сигнала, соответствующий N отсчетам частоты дискретизации АЦП на приемной стороне.
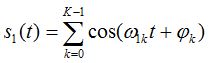
Формируемый модулятором групповой сигнал представляет собой сумму гармонических колебаний, ортогональных на длительности Та:

После переноса передатчиком спектра сформированного модулятором сигнала на рабочую частоту КВ диапазона и обратного переноса спектра приемником, на демодулятор поступает сигнал:
смещенный по частоте относительно исходного на некоторую величину Δω = ω1k – ω0k.
В режиме относительной фазовой манипуляции, когда основным информационным параметром является разность начальных фаз текущей и предыдущей элементарных посылок, смещение частоты сигнала на Δω приведет к смещению разности фаз в отсутствии помех на величину δφ = Δω * T
Если набег фазы из-за смещения частоты не превышает значения π/2 , т.е. соблюдается условие Δω < π/2T, возможно определение смещения частоты по отклонению фазы от ожидаемого значения при передаче рабочего сигнала в режиме двухпозиционной ОФМ, когда еще неискаженные (ожидаемые) значения разности фаз на выходе модулятора принимают значения 0 и π.
Демодулятор приемной стороны для каждого k–го субканала на длительности m–й посылки формирует значения разности фаз Δφт,к = φт,к – φт-1,к, , которые будут отличаться от заданных на выходе модулятора значений из-за частотного смещения и канальных помех.
Для получения оценки частотного смещения на длительности, соответствующей M элементарных посылок, получим:
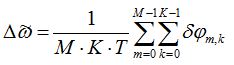
δφт,к -угол, на который отклоняется разность фазы Δφт,к от ближайшего ожидаемого значения, равного 0 или π в режиме двухпозиционной ОФМ.
При передаче данных по радиоканалу возникает задача компенсации частотного смещения принимаемого демодулятором сигнала s1(t) на некоторую вычисленную величину Δω относительно формируемого модулятором исходного сигнала so(t).
Смешение по частоте представленного в аналитическом виде сигнала на величину Δω можно осуществить с помощью простого преобразования:
![]()
Основная проблема, при условии известного на приемной стороне значения смещения частоты, заключается в том, что в подавляющем большинстве случаев на демодулятор поступает сигнал в вещественном виде s1(t).
Обычно компенсация частотного смещения осуществляется в области высоких частот. При этом можно составить схему (см. рис.18), где используется генератор высокочастотных колебаний, перемножители, фильтры низкой частоты, сумматор:
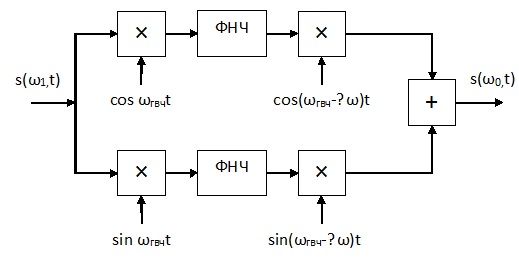
Данная схема, реализованная программно, требует значительного объема вычислений в единицу времени, поскольку обработка сигнала производится в высокочастотной области, что из-за ограниченной производительности вычислителя не всегда применимо при работе в режиме реального времени.
Получить программными методами аналитический сигнал s1(t) из вещественного сигнала s1(t), без переноса спектра сигнала в высокочастотную область, можно при помощи матричных преобразований. Применив N –точечное дискретное преобразование Фурье на длительности элементарной посылки Т=Та+Тз к оцифрованному сигналу s1n, получим его дискретный спектр:

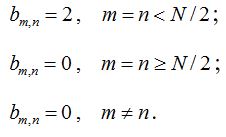
Спектр вещественного сигнала определен как в области положительных, так и в области отрицательных частот, тогда как спектр аналитического сигнала определен лишь в неотрицательной частотной области. Обнулим спектральные компоненты вектора S1, находящиеся в отрицательной частотной области, произведя умножение на квадратную матрицу B размером M, элементы которой:
Таким образом, получаем вектор спектра аналитического сигнала ![]() , из которого, используя обратное дискретное преобразование Фурье, получим аналитический сигнал:
, из которого, используя обратное дискретное преобразование Фурье, получим аналитический сигнал:

Умножая вектор S1 на квадратную матрицу С размером M, элементы которой:
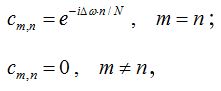
получим комплексный вектор ![]() , осуществив тем самым компенсацию частотного смещения принятого сигнала на величину Δω.
, осуществив тем самым компенсацию частотного смещения принятого сигнала на величину Δω.
Вышеизложенные преобразования можно записать в операторном виде:
![]() , где Ф+ и Ф- операторы прямого и обратного преобразования Фурье соответственно.
, где Ф+ и Ф- операторы прямого и обратного преобразования Фурье соответственно.
Вещественную часть полученного аналитического сигнала ![]() можно использовать для последующей обработки методами ЦОС в качестве восстановленного на длительности интервала анализа исходного сигнала, поступающего далее на вход демодулятора.
можно использовать для последующей обработки методами ЦОС в качестве восстановленного на длительности интервала анализа исходного сигнала, поступающего далее на вход демодулятора.
Данный метод компенсации частотного смещения принимаемого в полосе телефонного канала группового сигнала в режиме передачи данных с многопозиционной относительной фазовой манипуляцией, позволяет существенно сократить, по сравнению с классическим методом, объем вычислений.
Глава 4. Разработка структурной схемы устройства
Практически все современные модемы имеют похожие функциональные схемы, состоящие из универсального процессора, сигнального процессора, оперативного запоминающего устройства (ОЗУ, RAM), постоянного запоминающего устройства (ПЗУ, ROM), постоянного энергонезависимого перепрограммируемого устройства (ППЗУ, ERPROM), собственно модулятора/демодулятора. Структура устройства современного модема представлена на рисунке 19.
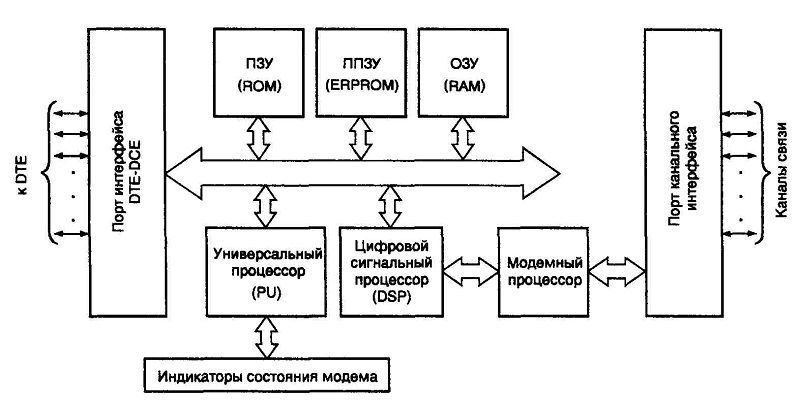
Устройства передачи данных, имеющие цифровые порты интерфейса DTE—DCE обеспечивает взаимодействие с DTE. Устройством DTE здесь может являться маршрутизатор. Порт канального интерфейса обеспечивает согласование электрических параметров с используемым каналом связи.
Универсальный процессор фактически является встроенным микрокомпьютером, отвечающим за прием и выполнение команд, буферизацию и обработку данных — кодирование, декодирование, сжатие/распаковку и т.п., а также за управление сигнальным процессором.
Сигнальный процессор (DSP, Digital Signal Processor – цифровой сигнальный процессор) и модулятор/демодулятор выполняют функции операции с сигналом — модуляцией/демодуляцией, разделением частотных полос, и т.п. В зависимости от типа и сложности модема основная интеллектуальная нагрузка смещается в сторону DSP или модулятора/демодулятора. В низкоскоростных (300..2400 бит/с) модемах основную работу выполняет модулятор/демодулятор, в скоростных
(4800 бит/с и выше) — DSP.
Микропрограмма управления модемом, хранится в ROM. Путем замены или перепрограммирования ROM иногда можно достичь существенного улучшения свойств модема, то есть произвести его модернизацию, или апгрейд (upgrade). Такого рода модернизация некоторых моделей модемов может обеспечить поддержку новых протоколов или сервисных функций. Для облегчения такой модернизации в последнее время вместо микросхем ROM стали широко применяться микросхемы флэш-памяти (FlashROM).
Схема ERPROM позволяет сохранять установки модема в так называемых профайлах или профилях модема на время его выключения. Память RAM интенсивно используется для временного хранения данных и выполнения промежуточных вычислений как универсальным, так и цифровым сигнальным процессорами.
Общая структурная схема радиопередачи информации по КВ – каналу, где участвует КВ – радиомодем представлена на рисунке 20.
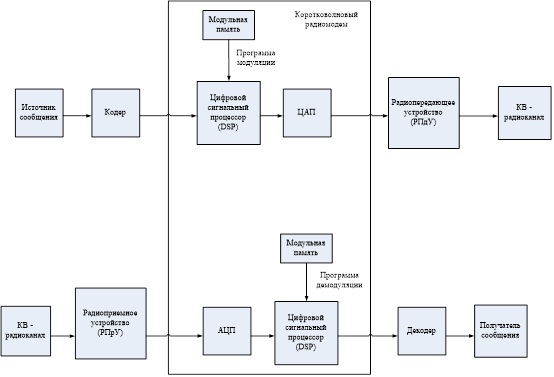
На вход кодера от источника сигнала поступает информационное сообщение, которое преобразуется в символы сообщения. Кодер рассматриваться не будет. После этого символы сообщения поступают на вход цифрового сигнального процессора (DSP), входящего в состав модема, где с помощью программы модуляции, которая запрашивается DSP из модульной памяти, преобразуются в групповой сигнал. Сформированные отсчеты подаются на ЦАП, выход которого поступает на вход радиопередающего устройства, где в дальнейшем происходит излучение сигнала в КВ-радиоканал.
После прохождения сигнала по КВ-радиоканалу, он поступает на вход радиоприемного устройства. Затем групповой сигнал поступает на вход АЦП, входящего в состав модема. С выхода АЦП оцифрованный сигнал поступает на вход DSP, который запрашивает программу демодуляции из модуля памяти для преобразования группового сигнала в символы сообщения. После прохождения модема символы сообщения поступают на декодер, где преобразуются в информационное сообщение, которое принимает получатель.
Главной частью КВ – радиомодема является цифровой сигнальный процессор (digital signal processor, DSP), поэтому рассмотрим выбор DSP подробнее. Выбирая цифровой сигнальный процессор, разработчику необходимо представлять существующий рынок цифровых сигнальных процессоров, знать основных производителей и направления развития создаваемых ими процессоров. Цифровые сигнальные процессоры обладают огромными возможностями по цифровой обработке сигналов: спектральный анализ, цифровая фильтрация, преобразование частоты дискретизации, подстройка в реальном времени скорости воспроизведения и т.п. С ростом числа приложений, использующих DSP, и сложности алгоритмов обработки увеличивается и требования к ним в плане повышения быстродействия и оснащенности интерфейсными и другими специализированными узлами. Поэтому первая задача разработчика — выбор процессора, наиболее подходящего по производительности, цене, наличию определенной периферии, потреблению мощности, простоте использования и другим критериям. Кроме того, во многих случаях имеет смысл учитывать и место на рынке, занимаемое поставщиком процессора, т.к. далеко не все производители могут предоставить в ваше распоряжение спектр процессоров, покрывающих все ваши потребности. Сложившееся к настоящему времени распределение рынка между ведущими поставщиками (см. табл. 1) показывает, что 4 компании, стоящие в начале списка, поставляют более 80% всех используемых в мире DSP. Именно эти компании наиболее известны и на российском рынке.
Производители DSP, проектируя новые микросхемы, достаточно четко позиционируют их для использования в тех или иных приложениях. Это оказывает влияние и на их архитектуру, и на быстродействие, и на оснащение процессора тем или иным набором периферийных модулей. В таблице 2 показано позиционирование DSP с точки зрения их создателей.
Таблица 1. Основные производители DSP и принадлежащие им доли рынка
| Компании-лидеры рынка | Компания | Доля рынка DSP |
| 1 | Texas Instruments | 54,3% |
| 2 | Freescale Semiconductor | 14,1% |
| 3 | Analog Devices | 8,0% |
| 4 | Philips Semiconductors | 7,5% |
| 5 | Agere Systems | 7,3% |
| 6 | Toshiba | 4,9% |
| 7 | DSP Group | 2,2% |
| 8 | NEC Electronics | 0,6% |
| 9 | Fujitsu | 0,4% |
| 10 | Intersil | 0,3% |
| Другие компании | 0,5% | |
| всего | 100,0% |
Таблица 2. Области применения семейств сигнальных процессоров разных производителей
| Обработка видео, видеонаблюдение, цифровые камеры, 3D графика | TMS320DM64x/DaVinci, TMS320C64xx, TMS320C62xx (TI), PNX1300, PNX1500, PNX1700 (Philips), MPC52xx (Freescale) |
| Обработка аудио, распознавание речи, синтез звука | TMS320C62xx, TMS320C67xx (TI), SHARC (Analog Devices) |
| Портативные медиа устройства | TMS320C54xx, TMS320C55xx (TI), Blackfin (Analog Devices) |
| Беспроводная связь, телекоммуникации, модемы, сетевые устройства | TMS320C64xx, TMS320C54xx, TMS320C55xx (TI), MPC7xxx, MPC86xx, MPC8xx PowerQUICC I, MPC82xx PowerQUICC II, MPC83xx PowerQUICC II Pro, MPC85xx PowerQUICC III (Freescale), Blackfin, TigerSHARC (Analog Devices), PNX1300 (Philips) |
| Управление приводами, преобразование мощности, автомобильная электроника, предметы домашнего обихода, офисное оборудование | TMS320C28xx, TMS320C24xx (TI), ADSP-21xx (Analog Devices), MPC55xx, MPC55xx (Freescale) |
| Медицина, биометрия, измерительные системы | TMS320C62xx, TMS320C67xx, TMS320C55xx, TMS320C28xx (TI), TigerSHARC, SHARC (Analog Devices) |
Рассмотрим основные характеристики процессоров, которые должен оценивать разработчик для того, чтобы выбрать наиболее подходящий DSP.
К основным характеристикам цифровых сигнальных процессоров относятся:
- Формат данных и разрядность
- Скорость
- Организация памяти
- Удобство разработки приложений
- Энергопотребление
- Стоимость
Рассмотрим более подробно эти характеристики.
Формат данных и разрядность
Одна из основных характеристик цифровых сигнальных процессоров — формат обрабатываемых данных.
Все DSP работают либо с целыми числами, либо с числами в формате с плавающей точкой, причем для целых чисел разрядность составляет 16 или 32, а для чисел с плавающей точкой она равна 32. Выбирая формат данных, необходимо иметь в виду следующее: DSP с целочисленными данными (или данными с фиксированной точкой) обычно дешевле и обеспечивают большую абсолютную точность при равной разрядности (т.к. на мантиссу в 32-битном процессоре с фиксированной точкой отводятся все 32 бита, а в процессоре с плавающей точкой — только 24). В то же время динамический диапазон сигналов, с которыми могут без искажений работать DSP, у процессоров с фиксированной точкой значительно уже (на несколько десятичных порядков). При относительно простых алгоритмах обработки это может быть неважно, т.к. динамический диапазон реальных входных сигналов чаще всего меньше, чем допускает DSP, однако в некоторых случаях возможно возникновение ошибок переполнения при выполнении программы. Это приводит к принципиально неустранимым нелинейным искажениям выходного сигнала, аналогичным искажениям из-за ограничения в аналоговых схемах.
Следовательно, при выборе DSP необходимо тщательно анализировать алгоритм обработки и входные сигналы для правильного выбора разрядности и типа арифметики. Иногда при невозможности подобрать подходящий процессор с плавающей точкой (из-за большей его стоимости или энергопотребления) используют DSP с фиксированной точкой и сжатие динамического диапазона обрабатываемых сигналов (компрессию), однако это приводит к увеличению сложности алгоритма обработки сигнала и повышает требования к быстродействию. Конечно, можно эмулировать операции с плавающей точкой и на процессоре с целочисленной арифметикой или перейти к обработке чисел удвоенной разрядности, однако это также значительно усложняет программу и значительно снижает быстродействие.
Несмотря на все ограничения, большинство встроенных приложений используют процессоры с фиксированной точкой из-за меньшей цены и энергопотребления.
Увеличение количества разрядов повышает стоимость, размер кристалла и число необходимых выводов процессора, а также необходимый объем внешней памяти. Поэтому стремятся использовать кристалл с минимально возможной разрядностью.
Стоит заметить, что разрядность данных и разрядность команд процессоров не всегда эквивалентны.