Скорость
Ключевой параметр при выборе процессора — это скорость. Она влияет на время выполнения обработки входного сигнала и, следовательно, определяет его максимальную частоту. Одна из самых частых ошибок разработчика — отождествление тактовой частоты и быстродействия, что в большинстве случаев неправильно.
Очень часто скорость работы DSP указывают в MIPS (миллионах инструкций в секунду). Это наиболее просто измеряемый параметр.
Однако проблема сравнения скорости различных DSP состоит в том, что процессоры имеют различные системы команд, и для выполнения одного и того же алгоритма разными процессорами требуется разное число этих команд. Кроме того, иногда для выполнения различных команд одним процессором требуется различное количество тактов синхронизации. В результате процессор со скоростью 1000 MIPS вполне может оказаться в разы медленнее процессора со скоростью 300 MIPS, особенно при различной их разрядности.
Одно из решений этой проблемы — сравнивать процессоры по скорости выполнения определенных операций, например, операции умножения с накоплением (MAC). Скорость выполнения таких операций критична для алгоритмов, использующих цифровую фильтрацию, корреляцию и преобразования Фурье. К сожалению, такая оценка также не дает полной информации о реальном быстродействии процессора.
Наиболее точной является оценка скорости исполнения определенных алгоритмов — например, КИХ- и БИХ-фильтрации, однако это требует разработки соответствующих программ и тщательного анализа результатов тестирования.
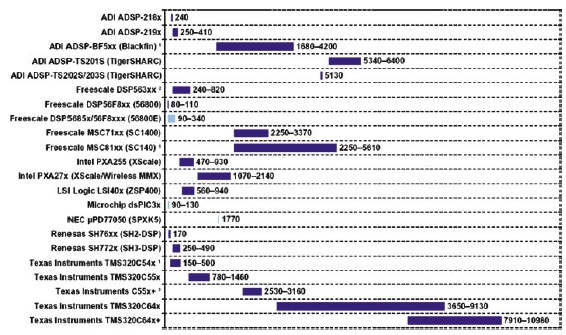
Существуют компании, занимающиеся анализом и сравнением процессоров по основным характеристикам, в том числе и по скорости. В качестве примера на рисунке 20 показано сравнение по скорости современных DSP разных производителей.
Организация памяти
Организация системы памяти процессора влияет на производительность. Это связано с тем, что ключевые команды DSP являются многооперандными и ускорение их работы требует одновременного чтения нескольких ячеек памяти. Например, команда умножения с накоплением требует одновременного чтения 2 операндов и самой команды для того, чтобы ее можно было выполнить за 1 такт. Это достигается различными методами, среди которых применение многопортовой памяти, разделение на память программ и память данных (Гарвардская архитектура), использование кэша команд и т.д.
Необходимый объем памяти определяется приложением. Необходимо учитывать, что встроенная в процессор память обычно имеет значительно большую скорость работы, чем внешняя, однако увеличение ее объема увеличивает стоимость и энергопотребление DSP, а ограниченный объем памяти программ не позволяет хранить сложные алгоритмы. В то же время при достаточности этого объема для ваших целей наличие встроенной памяти позволяет значительно упростить конструкцию в целом и понизить ее размеры, энергопотребление и стоимость. Большинство DSP с фиксированной точкой, применяющиеся во встраиваемых приложениях, предполагают малый объем внутренней памяти, обычно от 4 до 256 Кбайт и невысокую разрядность внешних шин данных.
В то же время DSP с плавающей точкой обычно предполагают, работу с большими массивами данных и сложными алгоритмами и имеют либо встроенную память большого объема, либо большую разрядность адресных шин для подключение внешней памяти (а иногда и то, и другое).
Еще раз подчеркнем — выбор типа и объема памяти должен быть результатом тщательного анализа приложения, в котором используется DSP.
Удобство разработки приложений
Степень сложности разработки определятся приложением. При этом необходимо иметь в виду, что большее удобство для разработчика (обычно связываемое с использованием при программировании DSP языков высокого уровня) в большинстве случаев оборачивается получением менее компактного и быстрого кода, что оборачивается необходимостью использования более мощных и дорогих DSP. С другой стороны, в современных условиях скорость разработки (и, следовательно, выхода нового изделия на рынок) может принести больше выгод, чем затраты времени на оптимизацию кода при написании программы на ассемблере. Кроме того, следует помнить, что безошибочных программ не бывает, поэтому средства отладки и возможность коррекции программ в готовом устройстве очень часто имеют первостепенное значение.
В то же время при выборе DSP и средств разработки необходимо учитывать некоторые особенности архитектуры процессоров.
Те, кто использует компиляторы с языком высокого уровня (ЯВУ), иногда замечают, что они генерируют лучший код для процессоров с плавающей точкой. Это происходит по нескольким причинам: во-первых, большинство языков высокого уровня изначально не поддерживают арифметику с фиксированной точкой, во-вторых, система команд DSP с фиксированной точкой более ограничена, и в-третьих, процессоры с плавающей точкой обычно накладывают меньшие ограничения на объем используемой памяти.
Наилучшие результаты получаются при компиляции программ на ЯВУ для VLIW-процессоров (процессорах со сверхдлинным словом команды) с простой ортогональной RISC-системой команд и большими регистровыми файлами. Однако даже для этих процессоров генерируемый компилятором код получается более медленным по сравнению с оптимизированным вручную ассемблерным.
С другой стороны, возможность сначала смоделировать процесс обработки сигнала в программе типа MathLab с дальнейшей автоматической трансляцией его в программу для DSP позволяет избавиться от множества серьезных ошибок еще на начальном этапе разработки.
Отладку готовых программ можно производить либо на аппаратном эмуляторе готовой системы, либо на программном симуляторе. Обычно отладка на симуляторе несколько проще с точки зрения используемой аппаратуры, однако она не позволяет выявить все возможные ошибки. Почти все производители обеспечивают разработчиков и симуляторами, и эмуляторами своих DSP.
Почти все современные DSP поддерживают внутрисхемную эмуляцию в соответствии со стандартом IEEE 1149.1 JTAG. При использовании технологии JTAG мы переходим от эмуляции процессора внешним устройством к непосредственному контролю над процессором при выполнении программы, что позволяет значительно увеличить степень соответствия макета реальному устройству и, следовательно, повысить надежность процесса отладки.
Помимо эмуляторов, производители предлагают широкий набор так называемых «стартер-китов» и «оценочных модулей», с помощью которых можно сразу приступить к разработке приложения, не дожидаясь изготовления макета разрабатываемого устройства. Кроме этого, в некоторых приложениях эти средства разработки можно использовать как конечные устройства.
Энергопотребление
DSP-процессоры широко используются в мобильных устройствах, где потребление мощности является основной характеристикой. Для снижения энергопотребления используется множество методов, в том числе уменьшение напряжения питания и введение функций управления потреблением, например, динамического изменения тактовой частоты, переключения в спящий или дежурный режим или отключения неиспользуемой в данный момент периферии. Следует отметить, что эти меры оказывают значительное воздействие на скорость работы процессора и при некорректном использовании могут привести к неработоспособности проектируемого устройства. Оценка потребления мощности является не простой задачей, так как эта величина варьируется в зависимости от выполняемых процессором задач. К сожалению, большинство производителей публикуют только «типичное» и «максимальное» потребление, а что понимается под этими определениями, не всегда ясно. Исключением является компания Texas Instruments, которая указывает потребление мощности в зависимости от типа команды и конфигурации процессора.
Стоимость
Стоимость процессора, несомненно, является определяющей величиной при выборе DSP, особенно при больших объемах производства. Обычно разработчики стремятся выбрать наиболее дешевый процессор, однако следует учитывать, что это может привести к значительным затратам на переделку устройства, если выбранный процессор по каким-либо причинам не позволит добиться нужных характеристик. Кроме того, при выборе процессора по критерию стоимости необходимо принимать во внимание стоимость внешних компонентов (например, DSP со встроенной памятью достаточного объема стоит дороже аналогичного без встроенной памяти, но цена устройства в целом на его основе может быть значительно ниже из-за отсутствия других компонентов и меньшего размера печатной платы). Очень значимым фактором, влияющим на стоимость DSP, является тип его корпуса: ИС в керамических корпусах, рассчитанные на промышленные или специальные условия эксплуатации, стоят значительно дороже таких же ИС, работающих в коммерческом диапазоне температур. И, наконец, цена процессора очень сильно зависит от объема и регулярности поставок.
Как показано ранее, правильный выбор DSP сильно зависит от приложения: процессор может хорошо подходить для одних приложении, но абсолютно не подходить для других.
При выборе процессора нужно определить самые важные в конкретном случае характеристики и расставить их по степени важности. Затем в соответствии с этими критериями отобрать возможных кандидатов и, наконец, выбрать из подходящих лучший, обращая внимание на дополнительные, не критичные характеристики.
При этом целесообразно воспользоваться оценкой характеристик процессоров, производимой какой-либо авторитетной компанией (например, BTDI). Следует помнить, что BTDI производит оценку DSP не только по быстродействию, но и по другим критериям: эффективности памяти, энергопотреблению и т.д.
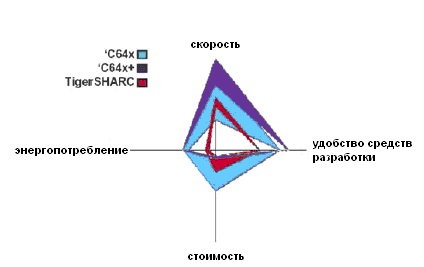
Например, для реализации приложения для нас в первую очередь важны скорость, цена, эффективность работы памяти и энергопотребление. Мы определили основных претендентов, среди которых DSP с ядром C64x и C64x+ от Texas Instruments и TigerSHARC от Analog Devices. На рисунке 21 показан граф сравнительных характеристик этих процессоров по критериям скорости, стоимости, энергопотребления и удобству средств разработки.
Для разрабатываемого КВ радиомодема в первую очередь необходима высокая скорость и низкая цена, поэтому из выше написанного был осуществлен выбор микропроцессора TMS320C6416BZLZD1 фирмы Texas Instruments. Такой микропроцессор способен справиться с поставленной задачей, производить обработку сигнала в реальном времени.
Рассмотрим выбор аналого-цифрового преобразователя(АЦП, или ADC) для КВ — радиомодема. На рынке сейчас предлагаются тысячи моделей АЦП поэтому выбор нужного АЦП для конкретного использования – задача сложная. Известны три типа современных аналого-цифровых преобразователей (АЦП, или ADC): с последовательной аппроксимацией сигнала (SAR), типа сигма-дельта (S-D) и конвейерного (поточного) типа (pipeline). Они широко применяются, как для сбора данных, высокоточных измерений, обработки аудио- и видеосигналов, обработки сигналов промежуточной частоты (ПЧ) и других задач, требующих вычислений большого количества операций в режиме реального времени.
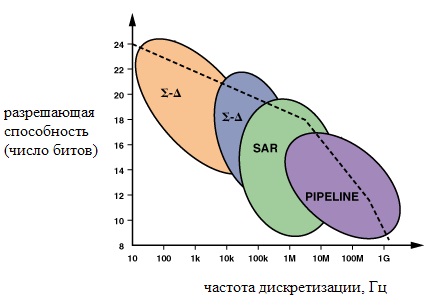
На рис.22 показана связь области использования с двумя основными параметрами: частотой дискретизации (Гц) и разрешающей способностью (число разрядов или бит на выборку). Пунктиром обозначена примерная «кривая наилучшего выбора». Несмотря на то, что в поле основных параметров области использования перекрываются, ясно, что именно область применения играют ключевую роль в выборе типа требуемого АЦП.
АЦП с последовательной аппроксимацией сигнала является наиболее популярным типом АЦП для систем сбора данных, особенно когда требуется мультиплексирование нескольких каналов данных. Этот тип преобразователей (SAR – successive approximation register) был впервые использован в экспериментальных ламповых ИКМ-системах Лабораториями Белла (США) еще в 1940-х годах.
Сегодня на смену гибридным устройствам 70-х годов пришли современные АЦП типа SAR на интегральных схемах (ИС) с разрешением 8–18 разрядов и частотой дискретизации несколько мегагерц. Выходные данные с преобразователей передаются через стандартный последовательный интерфейс, например I2C (двухпроводная цифровая последовательная шина для соединения ИС) или SPI (последовательный интерфейс периферийных устройств), хотя ряд устройств использует параллельный выход (размеры устройств при этом увеличены, из-за необходимости обеспечить большее число контактов).
Базовая схема АЦП типа SAR приведена на рисунке 23.
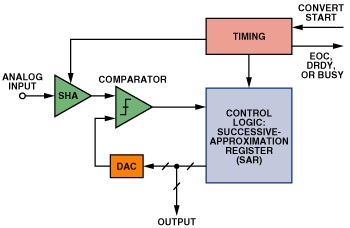
Для того чтобы обрабатывать быстроменяющиеся сигналы, АЦП типа SAR имеют на входе усилители выборки с фиксацией амплитуды (SHA), сохраняющие сигнал постоянным в течение цикла преобразования. Сначала внутренний ЦАП (цифроаналоговый преобразователь, или DAC) устанавливается в середину диапазона преобразования. Компаратор сравнивает выходы усилителя-фиксатора SHA и преобразователя ЦАП, определяя соотношение (больше или меньше) между ними. Результат, то есть величина наиболее значащего бита (MSB) преобразования, запоминается в регистре последовательной аппроксимации сигнала (SAR) как «1» или «0».
Затем ЦАП устанавливается на уровне 1/4 или 3/4 диапазона (в зависимости от величины MSB), и компаратор принимает решение относительно величины второго бита (разряда) преобразования. Результат («1» или «0») сохраняется в том же регистре. Процесс продолжается до тех пор, пока не будут определены все разряды. Хотя сокращение SAR означает «регистр последовательной аппроксимации сигнала» – логический блок, управляющий процессом преобразования – оно всеми понимается как обозначение одного из типов АЦП в целом.
Временная диаграмма обычного АЦП типа SAR представлена на рис. 24. Показанные на рисунке функции, как правило, представлены в большинстве АЦП типа SAR, но их точные обозначения могут отличаться от устройства к устройству. Заметим, что данные, соответствующие конкретной выборке, доступны в конце цикла преобразования и «потоковая/конвейерная» задержка отсутствует. Это обусловливает легкость использования АЦП типа SAR как для однократных преобразований (single-shot), так и в пакетном режиме передачи (burst-mode), или в задачах, требующих мультиплексирования потоков данных (multiplexed applications).
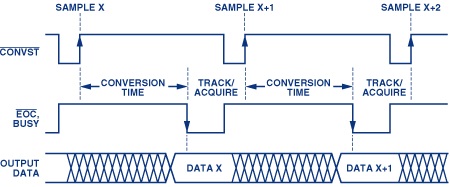
Рисунок 24 Временная диаграмма АЦП типа SAR
Процесс внутреннего преобразования наиболее современной ИС АЦП типа SAR управляется с помощью высокоскоростного генератора тактовых импульсов (ГТИ), внутреннего или внешнего, который не нужно синхронизировать со входом CONVERT START (Начало преобразования).
Общая точность и линейность преобразователя АЦП типа SAR определяется в первую очередь характеристиками внутреннего ЦАП. Первые высокоточные АЦП типа SAR, для достижения желаемой точности и линейности использовали ЦАП с тонкопленочными резисторами лазерной подгонки. Однако процесс выращивания и подгонки резисторов увеличивает стоимость устройства, а номинал резистора может измениться под действием механических воздействий при упаковке ИС.
По этой причине в новых КМОП АЦП типа SAR стали широко использовать ЦАП с коммутируемыми конденсаторами (или перераспределением заряда). Принципиальное преимущество таких ЦАП – точность и линейность – определяется высокой точностью процесса фотолитографии, который формирует плоскости/обкладки конденсатора, а следовательно, емкость и степень ее соответствия номиналу. Дополнительно можно разместить (параллельно с основными конденсаторами) небольшие конденсаторы, которые подключаются или отключаются в процессе работы подпрограмм автокалибровки для достижения высокой точности и линейности, что исключает необходимость лазерной подгонки номиналов. При этом достигается высокая температурная стабильность, так как результирующий температурный коэффициент емкости (ТКЕ) между конденсаторами может быть лучше, чем 10-6/°С.
КМОП-процесс, используемый при изготовлении современных АЦП типа SAR, также идеально подходит для формирования аналоговых коммутаторов. Поэтому относительно просто добавить функцию входного мультиплексирования к основной функции АЦП типа SAR и интегрировать систему сбора данных целиком на одном кристалле. Также легко добавить к АЦП типа SAR и другие цифровые функции, которые позволят сформировать такие общие для современных АЦП особенности, как установление последовательности мультиплексирования каналов с помощью секвенсора (программно-временного переключателя), цепи автокалибровки и пр.
Конвейерные АЦП для высокоскоростных приложений
На рис. 22 показано, что существует одна область, где SAR- и конвейерные АЦП перекрываются по частоте дискретизации (примерно между 1 и 5 Msps). Кроме этой небольшой области, высокоскоростные приложения, как правило, обслуживаются конвейерными АЦП. Сегодня конвейерные КМОП АЦП малой мощности выбираются не только для видео, но и для других приложений. Это отличается от ситуации 1980-х годов, когда видеоприложения обслуживались или быстродействующими флэш-АЦП (доминирующими были 8-разрядные АЦП с частотой дискретизации между 15 и 100 Msps), или (для приложений, требующих большего разрешения) более дорогими гибридно-модульными решениями. Хотя флэш-АЦП с малым разрешением остаются важными функциональными блоками для конвейерных АЦП, они редко используются как автономные устройства, за исключением очень высоких частот дискретизации – обычно больше, чем 1–2 ГГц (при требуемом разрешении не выше 6–8 разрядов).
Сегодня высокоскоростные АЦП требуются целому ряду инструментальных приложений: цифровым осциллографам, спектроанализаторам и устройствам формирования медицинских изображений. Другая группа приложений, требующих высокоскоростных АЦП, это видео, радары, связь. Сюда относятся ПЧ-дискретизация, программно-перестраиваемое радио (SDR), базовые станции, декодеры КТВ и т.д., а также бытовая электроника – цифровые камеры, системы отображения информации (СОИ), DVD, ТВ высокого качества (ТВК) и высокой четкости (ТВЧ).
Конвейерные (потоковые) АЦП берут свое начало в каскадной архитектуре, первоначально используемой в 1950-х годах. Блок-схема простого 6-разрядного (разделенного на два каскада) АЦП показана на рисунке 25.
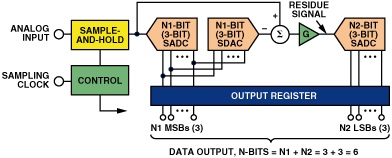
Выход усилителя SHA оцифровывается первым каскадом 3-разрядного субАЦП (SADC) – обычно это флэш-АЦП. Это грубое 3-разрядное преобразование (формирующее MSB) преобразуется обратно в аналоговый сигнал, используя 3-разрядный субЦАП (SDAC). Затем выходной сигнал преобразователя SDAC вычитается из выходного сигнала SHA, разностный сигнал усиливается, и этот «остаточный сигнал» оцифровывается вторым каскадом 3-разрядного SADC, чтобы сгенерировать три LSB для окончательного формирования 6-разрядного выходного слова.
Каскадный АЦП можно оценить, анализируя форму остаточного сигнала перед входом второго каскада АЦП, как показано на рис. 26.
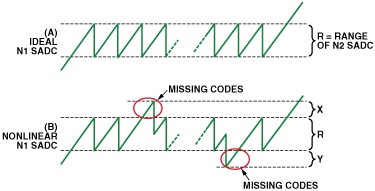
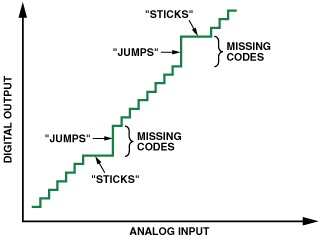
Эта форма типична для низкочастотного пилообразного сигнала, приложенного к аналоговому входу данного АЦП. Для того чтобы не было пропущенных кодов, остаточный сигнал не должен превышать входной диапазон второго каскада АЦП, как показано на рис. 26а для идеального случая. При этом подразумевается, что как N1-разрядный SADC, так и N1-разрядный SDAC должны иметь точность лучше, чем (N1+N2)-разрядный АЦП. В нашем случае N1=3, N2=3 и N1+N2=6. На рис. 26б показана ситуация, которая приводит к появлению пропущенных кодов, когда остаточный сигнал выходит за пределы диапазона N2 SADC, помеченного как «R», и лежит в пределах зон «X» или «Y», что может быть вызвано нелинейностью N1 SADC или несогласованностью усиления между каскадами и/или смещением рабочей точки. В этих условиях выходной сигнал такого АЦП может выглядеть так, как показано на рис. 27.
Рассмотренная архитектура имеет смысл при разрешающей способности до 8 разрядов (N1=N2=4), так как поддерживать выравнивание между двумя каскадами лучше, чем на этом уровне, будет трудно (в частности из-за температурных изменений). Нужно отметить, что в этой каскадной архитектуре нет конкретных требований на одинаковое число разрядов, приходящихся на один каскад. Однако число каскадов может быть больше двух. Тем не менее, архитектура на рис. 25 ограничена примерно 8 разрядами, если не используется коррекция ошибок.
Архитектура каскадного АЦП с коррекцией ошибок появилась в середине 1960-х годов как эффективное средство достижения высокой разрешающей способности. Но использование основной каскадной архитектуры при этом продолжалось. В двухкаскадном 6-разрядном АЦП, например, один дополнительный разряд добавляется во втором каскаде АЦП, что позволяет оцифровывать зоны, показанные как «X» и «Y» на рис. 26. Дополнительные зоны у второго каскада АЦП допускают отклонение остаточного сигнала от идеального значения при условии, что оно не превысит предельный диапазон второго каскада АЦП. Однако внутренний SDAC должен иметь разрешающую способность, большую, чем общая разрешающая способность N1+N2.
Основная блок-схема 6-разрядного каскадного АЦП с коррекцией ошибок показана на рис. 28.
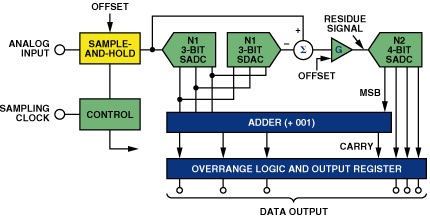
Разрешающая способность второго каскада в нем увеличена до 4 разрядов, тогда как изначально она составляла 3 разряда. Дополнительная логика, требуемая для модификации результатов N1 SADC, когда остаточный сигнал попадает в зоны «X» или «Y», осуществляется с помощью простого сумматора и напряжения смещения постоянного тока, добавленного к остаточному сигналу. В этом варианте реализации MSB второго каскада SADC управляет тем, будут ли MSB инкрементироваться на 001 или будут передаваться немодифицированными. Нужно заметить, что во втором каскаде АЦП можно использовать больше одного корректирующего разряда. Эта альтернатива, как часть процесса проектирования преобразователя, здесь не рассматривается. Каскадный АЦП с коррекцией ошибок, показанный на рис. 28, не имеет потоковой задержки. Входной усилитель SHA остается в режиме фиксации в течение времени, требуемого для совершения следующих событий: первый каскад SADC принимает решение, его выход реконструируется первым каскадом SDAC, выходной сигнал SDAC вычитается из выходного сигнала SHA, усиливается и оцифровывается вторым каскадом SADC. После того, как цифровые данные проходят через логические схемы коррекции ошибок и выходные регистры, их можно использовать, а преобразователь готов для ввода другой выборки.
Для увеличения скорости основного каскадного АЦП чаще всего используется «конвейерная» (pipelined) архитектура, показанная на рис. 29.
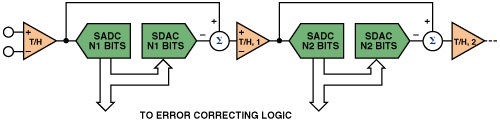
Такой конвейерный АЦП имеет каскадную архитектуру с цифровой коррекцией, в которой каждые два каскада обрабатывают данные в течение половины цикла преобразования, а затем передают остаточный выходной сигнал на следующий каскад «конвейера» перед тем, как наступит следующая фаза периода дискретизации. Межкаскадный следящий усилитель с фиксацией (T/H) играет роль аналоговой линии задержки, которая переводится в режим фиксации сигнала тогда, когда закончится преобразование в первом каскаде. Это увеличивает отрезок времени, выделяемый на установление сигнала для внутренних преобразователей SADC, SDAC и усилителей, и допускает работу конвейерного преобразователя с существенно большими скоростями дискретизации в целом по сравнению с неконвейерной версией. Существует ряд компромиссов, которые могут быть приняты при проектировании конвейерного АЦП. Они касаются выбора числа каскадов, числа разрядов на один каскад, числа корректирующих разрядов и синхронизации фаз процесса. Для того чтобы обеспечить одновременный приход цифровых данных (соответствующих определенным выборкам) от отдельных каскадов на логическую схему коррекции ошибок, нужно добавить надлежащее число регистров сдвига на выход каждого конвейерного каскада. Например, если первый каскад требует семи регистровых задержек, то следующий каскад – шести, следующий за ним – пяти и т.д. Это добавляет к окончательно сформированным выходным данным задержку цифрового конвейера.
Более тонкий вопрос для большинства КМОП конвейерных АЦП – их показатели при низких частотах дискретизации. Благодаря тому, что внутренняя синхронизация в общем случае управляется внешним тактом с частотой дискретизации, очень низкие частоты дискретизации увеличивают время фиксации для внутренних усилителей слежения и фиксации до таких величин, когда избыточный наклон (вызванный уменьшением уровня зафиксированного сигнала) приводит к ошибкам преобразования. Поэтому для большинства конвейерных АЦП в спецификации указывается как максимальная, так и минимальная скорости дискретизации. Очевидно, что это препятствует их работе в приложениях, использующих однократные и монопольные пакетные режимы преобразования, для которых более удобно использовать архитектуру АЦП типа SAR.
Наконец, важно подчеркнуть различие между каскадными и конвейерными АЦП. Из рассуждений, приведенных выше, следует: несмотря на то, что конвейерные АЦП в общем случае используют каскадирование (как правило, с коррекцией ошибок), каскадные АЦП не должны обязательно быть конвейерными. Фактически, конвейерная каскадная архитектура является доминирующей благодаря требованиям на высокую частоту дискретизации, когда внутреннее время установления сигнала исключительно важно.
Конвейерные АЦП, доступные сегодня, имеют разрешающую способность 14 разрядов и частоту дискретизации выше 100 МГц. Они идеальны для многих приложений, которые требуют не только высокую частоту дискретизации, но и высокое отношение сигнал/шум (SNR) и неискаженный динамический диапазон (SFDR). Одно из широко распространенных приложений этих преобразователей сегодня – программно-перестраиваемое (цифровое) радио (SDR) – технология, которая используется современными базовыми станциями для сотовых телефонов.
Последовательная аппроксимация используется почти во всех системах сбора данных с мультиплексированием на входе, а также во многих инструментальных приложениях. Преобразователи АЦП типа SAR просты в применении, не имеют потоковой (конвейерной) задержки, их разрешающая способность – до 18 разрядов, а частота дискретизации до 3 Msps.
Для широкого круга промышленных измерительных приложений идеально подходят сигма-дельта АЦП. Они могут иметь разрешающую способность от 12 до 24 разрядов. Сигма-дельта АЦП удобны для широкого круга приложений, связанных с датчиками, мониторингом потребления энергии и с управлением двигателями. Во многих случаях высокое разрешение и добавление на чип массива PGA допускает использование прямой связи между датчиком и АЦП без всяких инструментальных усилителей или других схем, формирующих нужные условия.
Сигма-дельта АЦП и ЦАП легко интегрируются в ИС, поддерживающих высокий уровень цифровой функциональности, а также доминируют в области голосовых и аудиоприложений. Использование внутренней процедуры передискретизации (oversampling) в этих преобразователях существенно ослабляет требования к фильтрам защиты от наложения спектров АЦП и фильтрам восстановления ЦАП.
При частотах дискретизации, больших чем примерно 5 Msps, доминирует конвейерная архитектура. Использующие ее приложения обычно требуют разрешения до 14 разрядов с высокими значениями SFDR и SNR при частотах дискретизации от 5 до 100 Msps. Этот тип АЦП используется во многих инструментальных приложениях (цифровые осциллографы, спектроанализаторы и устройства формирования медицинских изображений). Другие приложения включают: видео, радары и связь (ПЧ-дискретизация, SDR, базовые станции и декодеры КТВ и т.д.) и бытовую электронику (цифровые камеры, СОИ, DVD, ТВК и ТВЧ).
Использование руководств по выбору АЦП и параметрических поисковых систем, а также базовые знания трех основных типов/архитектур АЦП, должно помочь проектировщику выбрать нужный АЦП для данного приложения.
Для выполнения поставленной задачи разрабатываемого устройства целесообразно использовать АЦП с последовательной аппроксимацией сигнала, такие АЦП считаются среднего быстродействия. Выше изложенному соответствует 18-разрядный АЦП AD7641 фирмы Analog Device с частотой дискретизации 2 миллиона отчетов в секунду. Данный АЦП не имеет пропусков кодов, имеет параллельный и последовательный интерфейсы, причем программно могут быть установлены 18-, 16- или 8- битные режимы передачи данных.
Заключение
В процессе выполнения дипломной работы были изучены принципы многоканальной передачи сообщений, выбран способ частотного ортогонального разделения каналов, так как он позволяет увеличить скоростные показатели МСП в КВ-каналах. Так же рассмотрены особенности распространения волн в КВ – канале, влияющие на качество передачи сообщений, такие как замирание сигналов и многолучевость. Был проведен анализ существующих на данный момент видов модуляции сигнала. По данным расчета скорости информационного потока, а так же возможности восстановления сигнального созвездия был выбран способ ОФМ модуляции.
По полученным данным были разработаны:
— алгоритм формирования сигнала;
— алгоритм демодуляции;
— алгоритм синхронизации тактовой частоты;
— алгоритм автоматической подстройки частоты.
Они позволяют осуществить модуляцию и демодуляцию сигнала поступающего в КВ — канал, производить тактовую синхронизацию, а так же автоматическую подстройку частоты.
Был рассмотрен способ реализации КВ радиомодема на основе цифрового сигнального процессора (DSP), а так же проведен анализ выбора DSP из существующих на данный момент.
Список используемых источников.
- Прокис Джон Цифровая связь. Пер. с англ. / Под ред. Д.Д. Кловского. — М.: Радио и связь. 2000.
- Кириллов В.И. Многоканальные системы передачи Учебник /
В.И. Кириллов – М. : Новое знание, 2002. - Основы построения телекоммуникационных систем и сетей: Учебник для вузов / В. В. Крухмалев, В. Н. Гордиенко, А. Д. Моченов и др.;
Под ред. В. Н. Гордиенко и В. В. Крухмалева. — М.: Горячая линия — Телеком, 2004. - Григорьев В.А. Сигналы современных зарубежных систем электросвязи Учебник – СПб.: ВАС, 2007
- Борисов Ю.П., Пенин П.И. Основы многоканальной передачи информации М.: Издательство «Связь» 1967
- Гоноровский И.С. Радиотехнические цепи и сигналы Учебник для вузов: М.: Радио и связь, 1986
- К. Феер Беспроводная цифровая связь. Методы модуляции и расширения спектра: М.: Радио и связь, 2000
- Скляр, Бернард Цифровая связь. Теоретические основы и практическое применение, 2-е издание: М.: Издательский дом «Вильямс», 2003
- Б.Р. Левин. Теоретические основы статистической радиотехники. М.: Советское радио. 1974г. т.1.
- К. Мардиа. Статистический анализ угловых измерений. М.: Наука. 1978г.
- В.И. Тихонов. Статистическая радиотехника. М.: Советское радио. 1966г.