или напишите нам прямо сейчас:
⚠️ Пожалуйста, пишите в MAX или заполните форму выше.
В России Telegram и WhatsApp блокируют - сообщения могут не дойти.
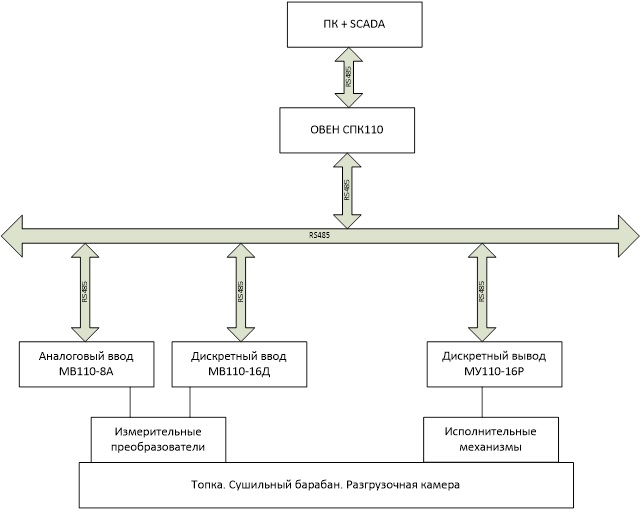
3.3. Схема КТС системы автоматизации
На Рис. 3.14 показана схема КТС системы автоматизации.
или напишите нам прямо сейчас:
⚠️ Пожалуйста, пишите в MAX или заполните форму выше.
В России Telegram и WhatsApp блокируют - сообщения могут не дойти.
К объекту автоматизации подключены измерительные преобразователи, которые передают измеренную информацию модулям аналогового и дискретного ввода. Исполнительные механизмы воздействуют на объект управления, получая управляющие сигналы от модулей аналогового или дискретного вывода.
Модули ввода и вывода подключены через шину RS485 к контроллеру СПК110.
Контроллер СПК110 в свою очередь подключается к персональному компьютеру на котором установлено программное обеспечение для диспетчерского управления и сбора данных (SCADA).
Глава 4. Описание математической модели объекта управления
В общем виде структуру математической модели объекта управления с выходным сигналом – разрежение в топке покажем на рис. 4.1.
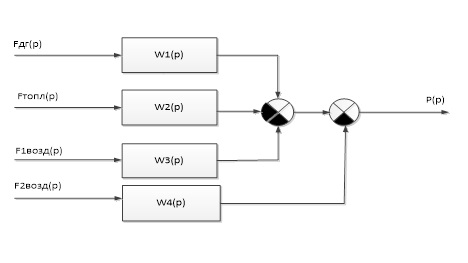
Рис. 4.1. Структура модели объекта управления
Передаточные функции W1(p) и W2(p) являются передаточными функциями по управляющим воздействиям. Для изменения разрежения можно изменять положение шибера в дымоходе за разгрузочной камерой Fдг(p) или подачу топлива (мазута) Fтопл(p).
Передаточные функции W3(p) и W4(p) являются передаточными функциями по возмущающим воздействиям. Возмущающими воздействиями являются расход первичного воздуха F1возд(p) и расход вторичного воздуха F2возд(p).
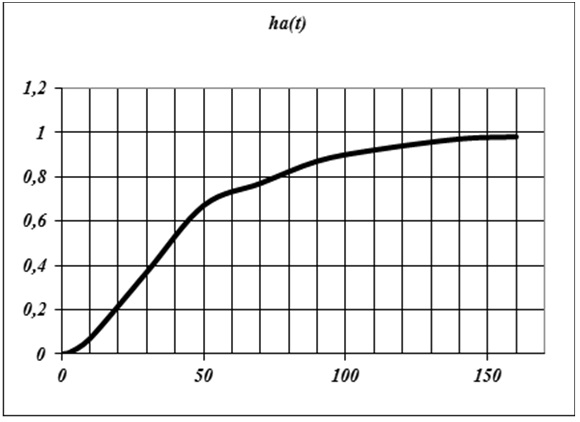
Далее выполним поиск передаточной функции W1(p). На предприятии инженеры-наладчики делали активный эксперимент. При таком эксперименте входная переменная изменяется ступенчато. Реакция объекта на такое изменение входной переменной, называется кривой разгона (переходной характеристикой), построена по данным таблице 4.1, приведена на рис. 4.2.
Таблица 4.1 – Переходная характеристика объекта управления по каналу «разрежение в топке – положение шибера в дымоходе»
| t, с | 0 | 10 | 20 | 30 | 40 | 50 | 70 | 90 | 110 |
| h(t) | 0 | 0,05 | 0,2 | 0,35 | 0,5 | 0,67 | 0,87 | 0,96 | 1 |
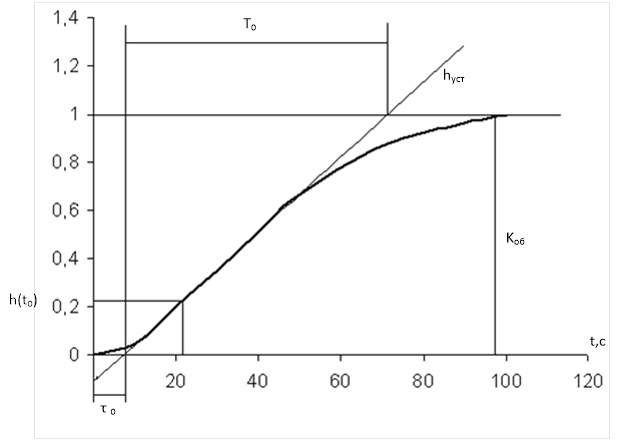
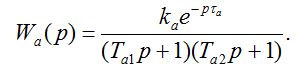
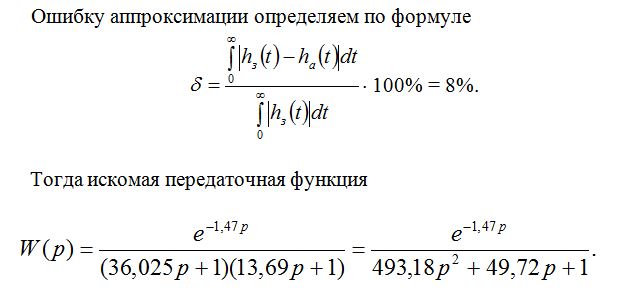
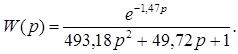
Проведем аппроксимацию переходной характеристики, передаточной функцией:
Для этого к графику исходной переходной характеристики h(t) в точке перегиба проводится касательная и определяется интервал времени T0, заключенный между точками пересечения этой касательной с осью абсцисс и линией установившегося значения hуст. переходной характеристики.
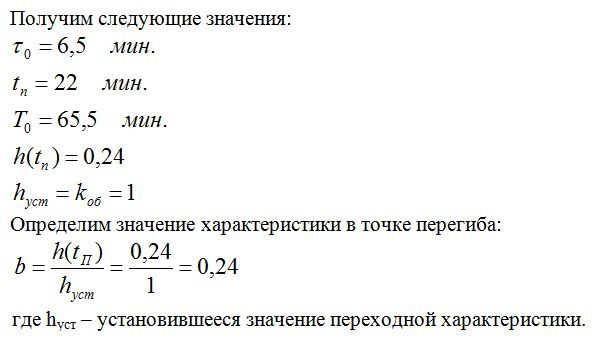
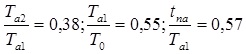
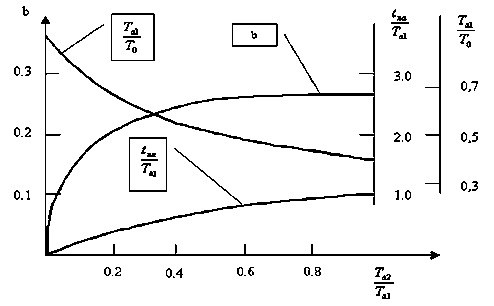
По номограмме приведенной на рисунке 4.3, по известному значению b находим следующие данные:
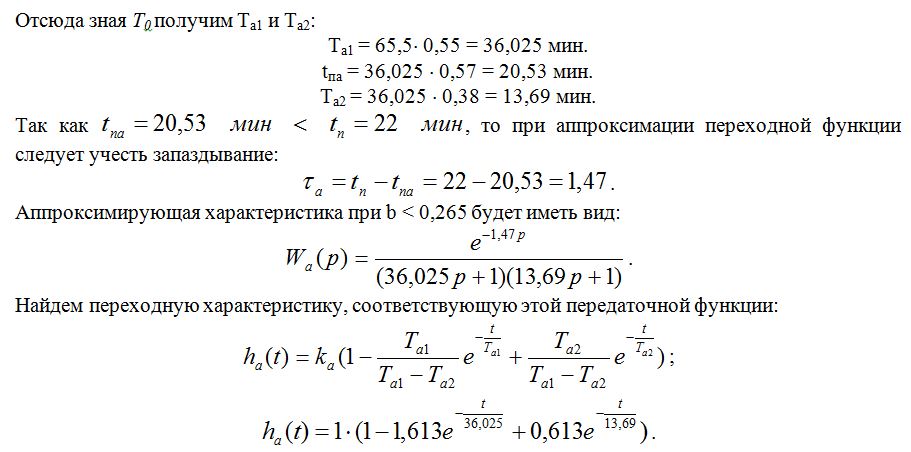
Рассчитаем эту переходную характеристику для различных значений t занесенных в таблицу 4.2. и построим график, представленный на рисунке 4.4.
Таблица 4.2 – Расчет переходной характеристики
| t | 0 | 1,5 | 3 | 10 | 30 | 50 | 70 | 90 | 110 | 140 | 160 |
| hа(t) | 0 | 0,003 | 0,008 | 0,07 | 0,37 | 0,67 | 0,77 | 0,87 | 0,92 | 0,97 | 0,98 |
Глава 5. Расчет настроек регулятора разработанной САУ разрежения в сушильном барабане
5.1. Алгоритмическая схема САУ разрежения
Выполним расчет САУ разрежения в сушильном барабане на основе алгоритмической схемы, приведенной на Рис. 5.1.
На Рис. 5.1 обозначены: Рзад – заданное разрежение, ε – ошибка регулирования разрежения, Рфакт – фактическое разрежение.
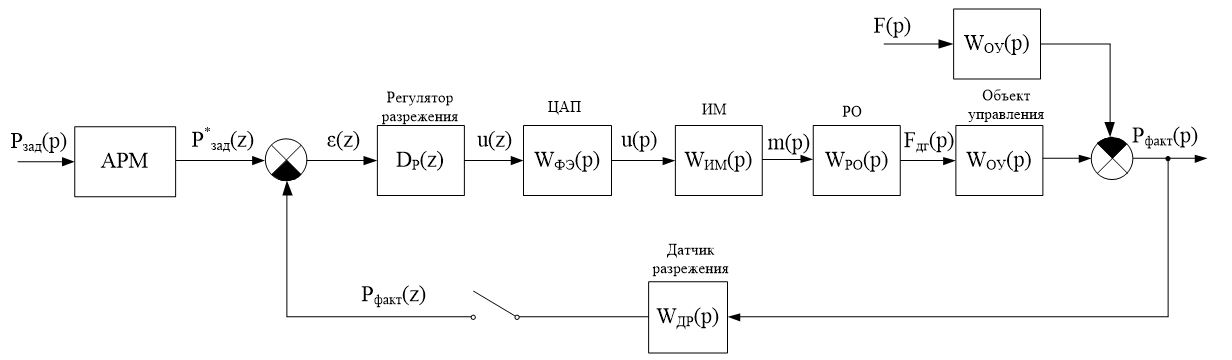
Также на Рис. 5.1 обозначены:
АРМ –автоматизированное рабочее место;
ФЭ –фильтрующий элемент;
ЦАП –цифро-аналоговый преобразователь;
ИМ –исполнительный механизм;
ОУ –объект управления;
ДР–датчик разрежения;
РО — регулирующий орган.
Непрерывные сигналы показаны в функции p, а дискретные – в функции z.
Данная алгоритмическая схема САУ соответствует реализации замкнутого контура регулирования на основе программируемого логического контроллера.
5.2. Определение параметров настройки САУ разрежения
Считаем, что для условий управления контуром регулирования разрежения достаточно применять пропорционально-интегральный (ПИ) регулятор.
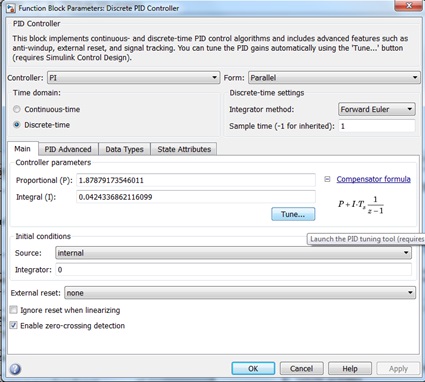
Передаточную функцию регулятора разрежения ПИ типа запишем в дискретной форме, принятой в блоке Discrete PID Controller [5]
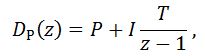
где P и I – параметры регулятора, требующие определения.
Передаточная функция цифро-аналогового преобразователя (ЦАП)
Далее определим параметры ПИ регулятора разрежения и с помощью пакета MatLab и его приложения Simulink. Для этого из блоков Simulinkсоберем модель САУ разрежения (Рис. 5.2).
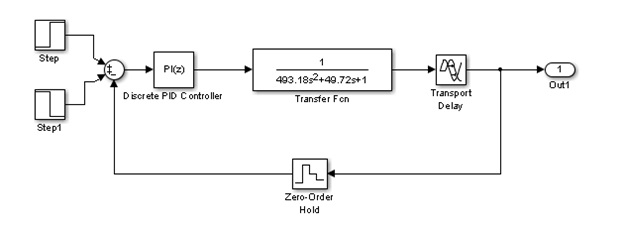
Рассмотрим назначение блоков в Simulink-модели (Рис. 5.2).
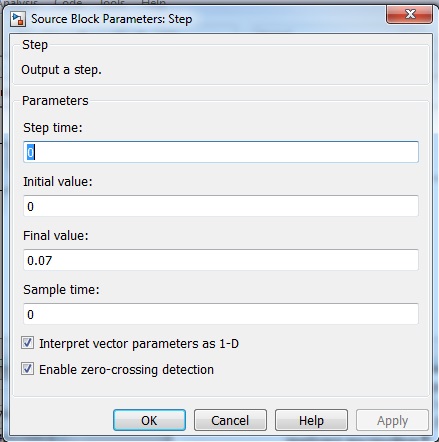
Блок Step формирует сигнал задания на разрежение – увеличение в момент времени 0 до значения 0,07 кПа (Рис. 5.3).
Блок Step формирует сигнал задания на разрежение – уменьшение в момент времени 300 с на 0,02 кПа до значения 0,05 кПа (Рис. 5.4).
Блок Discrete PID Controller – дискретный ПИ-регулятор, параметры которого требуют настройки.

Блоки TransferFcn и TransportDelay соответствуют передаточной функции объекта управления
Блок Zero-OrderHold (экстраполятор нулевого порядка) обеспечивает переход от непрерывных переменных к дискретным переменным.
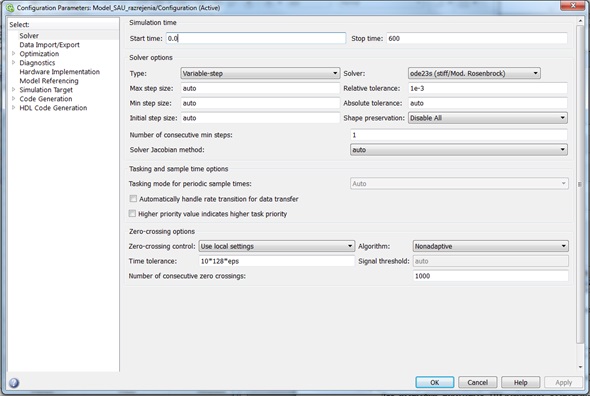
При моделировании установлен метод расчета с переменным шагом ode23s, время моделирования 600 с, остальные настройки параметров расчета при моделировании приведены на Рис. 5.5.
Для настройки параметров ПИ-регулятора воспользуемся возможностями блок Discrete PID Controller.Для этого требуется открыть диалоговое окно блока Discrete PID Controller («ПИД-регулятор»), указать период дискретизации и нажать кнопку Tune («Настройка»). Откроется окно PID Tuner (Рис. 5.6).
Интерфейс настройки SimulinkControlDesign линеаризует объект в текущей рабочей точке и строит линейную модель объекта с постоянными параметрами, с которой взаимодействует блок ПИ-регулятора в замкнутом контуре управления. Вычислительная задержка, связанная с дискретизацией сигнала, учитывается автоматически. Используя метод автоматической настройки, интерфейс SimulinkControlDesign вычисляет первоначальные коэффициенты усиления ПИ-регулятора. Этот метод не накладывает никаких ограничений на порядок объекта или постоянную времени, причем он работает в областях как непрерывного, так и дискретного времени.
Данный метод настройки параметров ПИ-регулятора использует интегральный квадратичный критерий оптимальности.
В результате вычисления параметров с помощью инструментов пакета MatLab были получены следующие значения: P = 1,87879 и I = 0,04243.
Глава 6. Исследование качества управления разработанной САУ разрежения в сушильном барабане
Выполним исследование качества САУ разрежения в сушильном барабане с помощью Simulink-модели (Рис. 5.2).
На Рис. 6.1 показана реакция замкнутой САУ с настроенным регулятором на единичный скачок задающего воздействия.
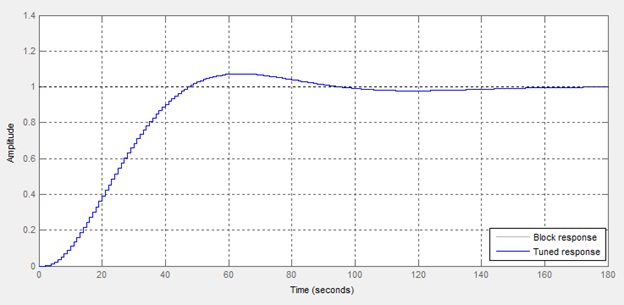
Как видно из Рис. 6.1 – перерегулирование составляет 7,3%, а время завершения переходного процесса – 126 с.
На Рис. 6.2 приведен переходный процесс в САУ разрежения при изменении разрежения от 0 до значения 0,07 кПа, а затем до 0,05 кПа.
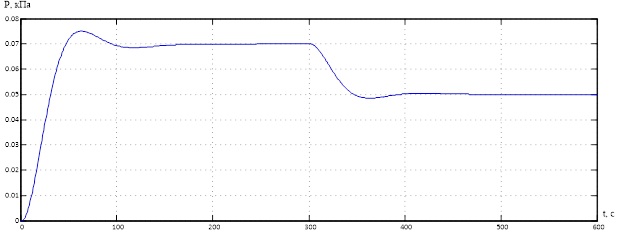
Полученные при моделировании переходные процессы свидетельствуют о том, что разработанная САУ удовлетворяет требованиям технологического процесса в сушильном барабане.
На Рис. 6.3 показаны графики ЛАЧХ (Magnitude) и ЛФЧХ (Phase) для разомкнутого контура регулирования разрежения.
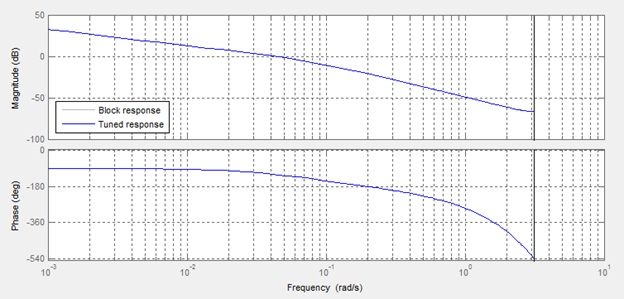
Запас устойчивости САУ по модулю составляет . Запас устойчивости САУ по фазе составляет . Замкнутая система устойчива.
Глава 7. Разработка функциональной схемы автоматизации аэродинамического режима сушильного барабана
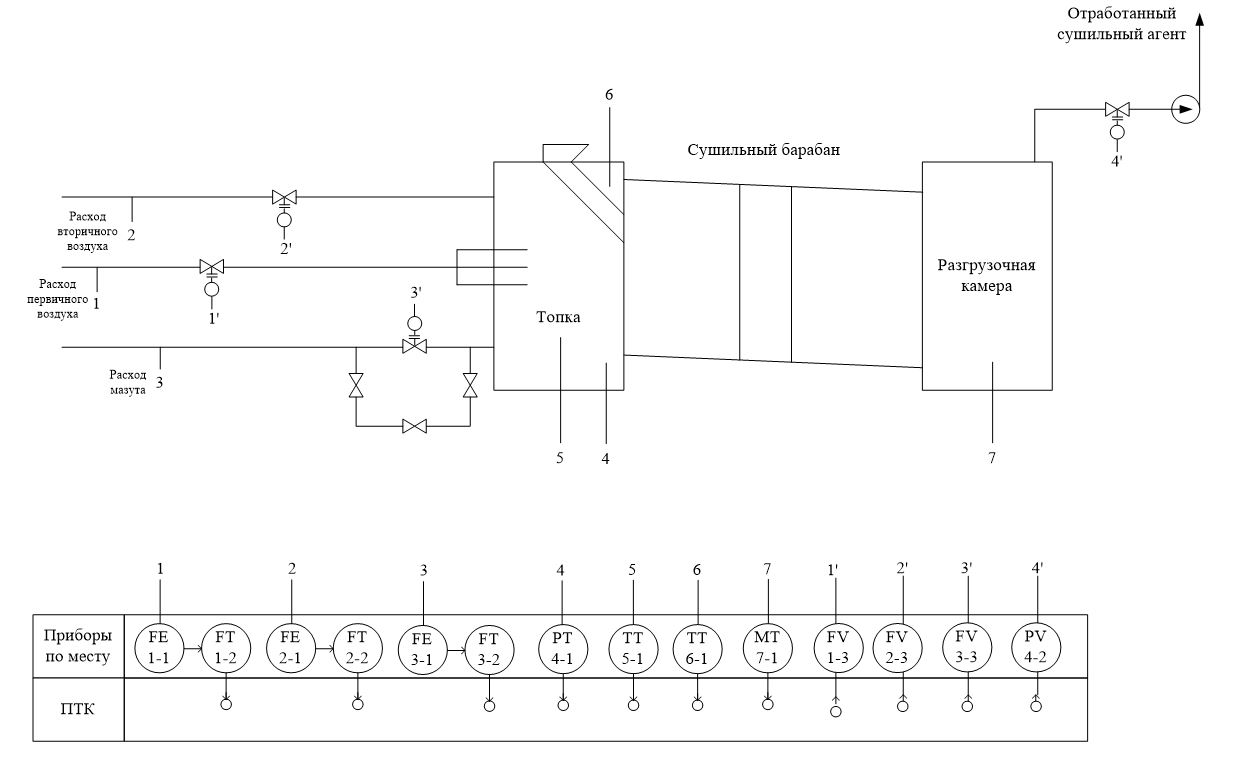
Система автоматизации сушильного агрегата АО «Апатит» включает в себя следующие САУ (Рис. 7.1):
- расход первичного воздуха (поз. 1);
- расход вторичного воздуха (поз. 2);
- расход мазута в топку (поз. 3);
- разряжение в топке (поз. 4);
- температура в топке (поз. 5);
- температура газов перед сушильным барабаном (поз. 6);
- влажность концентрата (поз. 7).
На рисунке 7.1 обозначены следующие приборы по месту:
- FE 1-1 – первичный преобразователь для измерения расхода первичного воздуха;
- FT 1-2 – вторичный преобразователь для измерения расхода первичного воздуха;
- FE 2-1 – первичный преобразователь для измерения расхода вторичного воздуха;
- FT 2-2 – вторичный преобразователь для измерения расхода вторичного воздуха;
- FE 3-1 – первичный преобразователь для измерения расхода мазута;
- FT 3-2 – вторичный преобразователь для измерения расхода мазута;
- PT4-1 – датчик разрежения в топке;
- TT 5-1 – датчик температуры в топке;
- TT6-1 – датчик температуры газов перед сушильным барабаном;
- MT 7-1 – датчик влажности концентрата;
- FV 1-3 – исполнительный механизм для изменения расхода первичного воздуха;
- FV2-3 – исполнительный механизм для изменения расхода вторичного воздуха;
- FV 3-3 – исполнительный механизм для изменения расхода мазута;
- PV 4-2 – исполнительный механизм для изменения положения шибера в дымоходе за разгрузочной камерой.
Функция технологических защит. Функция должна обеспечивать автоматическое отключение оборудования при отклонении контролируемых параметров от граничных значений и возникновении аварийных ситуаций с выдачей аварийной световой и звуковой сигнализации (в том числе по месту). Действие функции прекращается при отсутствии условий, вызывающих срабатывание защиты и снятия (квитирования) аварии оперативным персоналом. Функция выполняется во всех режимах работы технологического оборудования.
Функция местного не сблокированного управления. Функция должна обеспечивать запуск и останов оборудования с выполнением функции контроля готовности для работы в период ремонта и наладки. Запуск и останов оборудования осуществляется с постов местного управления с обязательной предпусковой световой и звуковой сигнализацией. В режиме местного не сблокированного управления технологические блокировки со связанным оборудованием не задействованы, за исключением комплектного вспомогательного оборудования.
Функция автоматического сблокированного управления. Функция должна обеспечивать автоматический последовательный сблокированный запуск и останов оборудования. Запуск оборудования осуществляется с обязательной предпусковой световой и звуковой сигнализацией. Запуск и останов высоковольтного оборудования выполняется от индивидуальных элементов управления на мнемосхемах, с выполнением функции контроля готовности. Функция должна предотвращать запуск оборудования при проведении ремонтных работ.
Функция ремонтного режима. Функция должна предотвращать местный и дистанционный запуск оборудования при проведении ремонтных работ.
Функция контроля готовности оборудования к пуску. Функция должна осуществлять контроль параметров, обеспечивающих штатный запуск технологического оборудования, с выдачей разрешающего сигнала и необходимой сигнализацией.
Функция автоматического регулирования. Функция должна обеспечивать автоматическое регулирование заданных параметров технологического процесса:
- выполнение алгоритмов стабилизации расхода кека на сушку;
- выполнение алгоритмов регулирования разрежения в топке сушильного барабана;
- выполнение алгоритмов регулирования расхода мазута в топку сушильного барабана;
- выполнение алгоритмов регулирования расхода первичного воздуха в топке сушильного барабана;
- выполнение алгоритмов регулирования расхода вторичного воздуха в топке сушильного барабана;
- выполнение алгоритмов регулирования расхода воды на орошение скруббера;
- выполнение алгоритмов стабилизации влажности концентрата.
Глава 8. Разработка функциональной схемы САУ разрежения в сушильном барабане
САУ разрежения (Рис. 8.1) входит в систему автоматизации сушильного агрегата. Данная САУ обеспечивает постоянство присосов воздуха в барабан. Регулирование присосов воздуха выполняется с помощью изменения шибера в дымоходе за разгрузочной камерой.
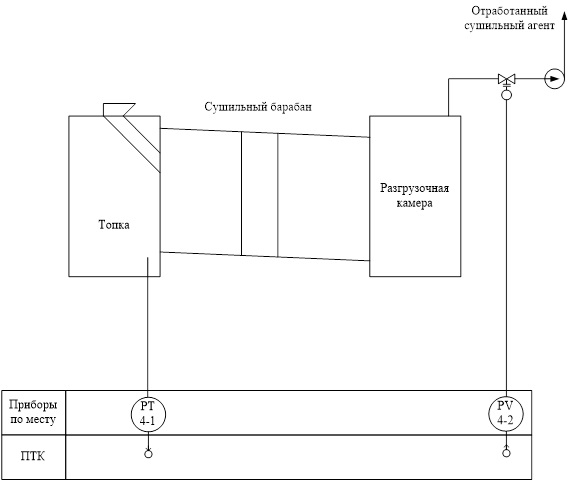
Информация о текущей величине разрежения в топке с помощью датчика разрежения PT4-1 поступает в ПТК, где с помощью соответствующих алгоритмов управления вычисляется управляющее воздействие, подаваемое на исполнительный механизм PV 4-2, воздействующий на шиберную заслонку в дымоходе за разгрузочной камерой. Таким образом, будет изменяться разрежение в топке. Управление с воздействием на шиберную заслонку в дымоходе выбрано из-за того, что положение шиберной заслонки в дымоходе за разгрузочной камерой является основным управляющим воздействием для разрежения в топке.
Заключение
В данной работе выполнена разработка системы автоматизации аэродинамических режимов, а именно САУ разрежения сушильного барабана АО «Апатит».
Система автоматизации разработана на программируемом логическом контроллере и модулях ввода/вывода российского производства (компания ОВЕН). В работе выполнено описание используемых устройств ОВЕН.
Составлены функциональные схемы системы автоматизации, системы автоматического управления.
Для САУ разрежения найдены оптимальные настройки регулятора.
Разработанная САУ разрежения отвечает всем современным требованиям и требованиям технологического процесса.
Полученные результаты могут использоваться при модернизации системы автоматизации в условиях предприятия АО «Апатит».
Список литературы
- Суриков В.Н., Буйлов Г.П. Автоматизация технологических процессов и производств.: учебно-методическое пособие / ГОУВПО СПбГТУРП. –СПб., 2011. Часть 1. -77 с.
- Буйлов Г.П. Автоматизация оборудования целлюлозно-бумажного производства: учебное пособие по дипломному проектированию. -2-е изд., испр. — / СПбГТУРП. – СПб., 2013. – 167 с.
- Буйлов Г.П., Доронин В.А., Серебряков Н.П. Автоматика и автоматизация производственных процессов целлюлозно-бумажных производств: учебное пособие для вузов. – М.: Экология, 1995. –320 с.
- Буйлов Г.П. Математические модели пропитки и пропарки щепы в производстве ВПВВ и их использование для управления и оптимизации / СПбГТУРП. – СПб., 2013. – 70 с.: ил. 23
- Дьяконов, В.П. MATLAB 6/6.1/6.5 + Simulink 4/5 в математике и моделировании: полное руководство пользователя / В.П. Дьяконов. — М. : СОЛОН-ПРЕСС, 2008. — 566 с. : ил. — Библиогр. в кн. — ISBN 5-93455-177-9 ; То же [Электронный ресурс]. — URL: http://biblioclub.ru/index.php?page=book&id=271895
- Панельный программируемый логический контроллер ОВЕН СПК110 – [Электронный ресурс] – Режим доступа: http://www.owen.ru/catalog/panelnij_programmiruemij_logicheskij_kontroller_oven_spk110/opisanie — Данные 02.06.2016 г.
- Модуль аналогового ввода МВ110-8А [Электронный ресурс] – Режим доступа: http://www.owen.ru/catalog/modul_vvoda_analogovih_signalov_owen_mv110_8a/opisanie — Данные 02.06.2016 г.
- Модуль аналогового вывода МУ110-6У [Электронный ресурс] – Режим доступа: http://www.owen.ru/catalog/modul_analogovogo_vivoda_owen_mu110_6u/opisanie — Данные 02.06.2016 г.
- Модуль дискретного ввода МВ110-16Д [Электронный ресурс] – Режим доступа: http://www.owen.ru/catalog/modul_vvoda_diskretnih_signalov_mv110_16d/opisanie — Данные 02.06.2016 г.
- Модуль дискретного вывода МУ110-16Р [Электронный ресурс] – Режим доступа: http://www.owen.ru/catalog/modul_diskretnogo_vivoda_oven_mu110_16r/opisanie- Данные 02.06.2016 г.
или напишите нам прямо сейчас:
⚠️ Пожалуйста, пишите в MAX или заполните форму выше.
В России Telegram и WhatsApp блокируют - сообщения могут не дойти.