3. Обоснование выбора необходимого технического обеспечения и разработка математической модели электропривода
3.1 Выбор оборудования системы управления приводов подач станка с ЧПУ модели 16К20Т1
Для исследуемого объекта решено применить схему частотно-регулируемого ЭП.
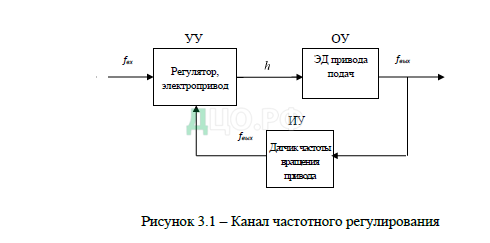
В качестве канала регулирования выбирается контур, объектом в котором является электродвигатель привода подач станка с ЧПУ модели 16К20Т1, а регулируемым параметром – частота вращения привода (fвых). Под влиянием возмущающих параметров данная частота измеряется датчиком частоты вращения, и электрический сигнал, соответствующий измеренному значению частоты, подаётся в управляющее устройство, где происходит сравнение полученного сигнала с заданным и выработка необходимых управляющих воздействий (h), корректирующих скорость вращения основного крепления. Схематично канал регулирования показан на рисунке 3.1.
В качестве преобразователя частоты решено применить модель ATV212HU40N4 [3], которая хорошо зарекомендовала себя на рынке
специальных технических средств. Внешний вид устройства приведен на рисунке 3.2.
Рисунок 3.2 – Внешний вид преобразователя частоты ATV212
Преобразователь частоты ALTIVAR 212 (ATV212) предназначен для трехфазных асинхронных двигателей с питанием от 220 и 380В (200-480).
Преобразователь частоты Altivar ATV212 значительно улучшает обслуживание систем за счет:
− обеспечения существенной экономии энергии;
− снижения уровня шума;
− гибкости и простоты установки оборудования.
Преобразователь частоты Altivar ATV212 имеет встроенный терминал с 7–сегментными индикаторами, который предназначен для идентификации и определения каналов активных команд (команда работы и задание скорости) Дисплей также позволяет осуществить:
− прямой доступ к последним пяти измененным параметрам;
− идентификацию параметров, установленных при изготовлении, в виде списка в меню;
− поддержку конфигурации пользователя.
Преобразователь частоты Altivar 212 позволяет осуществлять функцию быстрой настройки с помощью «Быстрого меню» (Quick menu), включающего в
себя 10 основных параметров (ускорение, торможение, параметры двигателя и т.д.).
Выходная частота (Гц): 0,5-200.
Перегрузочная способность: 120% в течении 1 минуты.
Преобразователь частоты Altivar 212 имеет встроенные протоколы Modbus и легко интегрируется в систему автоматизации, использующую Modbus, BacNet, APOGEE FLN P1 и MetaSys N2 (в стандартной комплектации) и в сеть Lonworks при помощи дополнительной коммуникационной карты.
Altivar 212 является оптимальным решением для систем HVAC зданий.
Вся серия преобразователей частоты соответствует международным стандартам МЭК/EN61800–5–1, МЭК/EN61800–2, МЭК/EN61800–3, имеет сертификаты UL, CSA, DNV, C–Tick, NOM 117 и ГОСТ и отвечает директивам по защите окружающей среды (RoHS, WEEE и др.), а также европейским директивам, которым соответствует маркировка CE.
Преобразователь частоты Altivar 212 (ATV212) обеспечивает выполнение всех функций, необходимых для Вашего применения:
− определение перегрузки/низкой нагрузки, «сухого хода» насоса;
− определение повреждение ремня;
− удаление дыма: форсировка работы с запретом неисправностей;
− функция мультидвигателя;
− ограничение времени работы на нижней скорости;
− функция «Сон/Пробуждение»;
− отсутствие гидроударов — увеличение срока эксплуатации установки;
− калибровка и ограничение задания;
− предустановленные скорости;
− автоматическая компенсация расхода для точного соответствия характеристике сети;
− автоматический перезапуск;
− управление заслонками;
− оптимизация управления потоками жидкостей и газов;
− использование ПИД-регулятора: температура, расход, давление;
− регулирование параметров: уменьшение потребляемой энергии;
− режим энергосбережения;
− отсутствие гидроударов и явлений резонанса оборудования;
− предустановленные скорости;
− снижение уровня шума (от воздушных потоков, двигателей);
− обеспечение всех функций защиты;
− счетчик наработки;
− автоподстройка.
Выбранный преобразователь ATV212HU40N4 имеет следящие характеристики:
– мощность – 4 кВт;
– ток в установленном режиме – 9,1 А;
– перегрузка по току (60 сек) – 10 А.
В процессе выполнения работы была разработана структурная схема модернизированной системы управления, которая приведена на рисунке 8.
В качестве автоматического регулятора решено использовать программируемый логический контроллер РС-265D [4].
Данный контроллер предназначен для автоматизации локальных и комплексных систем управления.
Корпус контроллера пластмассовый.
Степень защиты — IP20.
Монтаж на DIN – рельс. Датчики и исполнительные устройства подключаются к разъемным клеммам по обе стороны контроллера PC265D в один ряд параллельно DIN – рельсу.
Структурная схема модернизированной системы управления приведена на рисунке 3.3.
Рисунок 3.3 – Структурная схема модернизированной системы управления
Внешний вид контроллера представлен на рисунке 3.4.
Рисунок 3.4 – Внешний вид контроллера РС265D
Так же в состав САУ будет входить пульт управления и индикации ПУ-102Щ, предназначенный для оперативного отображения значений измеряемых величин и программирования значений функциональных параметров совместно с используемым программируемыми логическими контроллером производства ООО «Контэл» [4].
Для подключения пульта управления, на передней панели контроллера имеется разъем типа RJ-11.
В качестве датчика частоты вращения основного вала решено использовать современный индуктивный бесконтактный датчик.
При выборе ВБИ с напряжением питания 10–30 в постоянного тока с тремя или четырьмя выводами следует отдавать предпочтение ВБИ с защитой коммутационного элемента от короткого замыкания и перегрузок (буква «З» в обозначении).
Реальные условия эксплуатации бесконтактных датчиков на оборудовании часто достаточно жесткие, воздействия разносторонние.
ДБИ не требуют обслуживания в процессе эксплуатации, но при монтаже следует учитывать определенные ограничения.
В разрабатываемой САУ решено использовать бесконтактный индуктивный датчик ВБИ-Б10-60К-1113-З [11].
3.2 Построение математической модели электропривода
Для построения математической модели проектируемой системы автоматического управления выбран объект вал электродвигателя.
Технологическим параметром системы управления выбрана частота вращения вала электродвигателя, поэтому далее будет рассматриваться контур регулирования вала основного электродвигателя.
Поддержание постоянной частоты вращения вала основного электродвигателя на заданном уровне будет осуществляться автоматически по сигналам датчика вращения. В качестве датчика вращения используется бесконтактный индуктивный датчик ВБИ-Б10-60К-1113-З.
Сигналы с данного датчика поступают в регулятор, который через исполнительные механизмы и регулирующие органы, будет осуществлять поддержание частоты вращения в заданных пределах.
Далее предполагается привести расчет технический расчет параметров регулятора, которые позволяют организовать управление работой в оптимальном режиме.
В работе используется система ПЧ-АД с обратной связью по скорости (рисунок 3.5).
Рисунок 3.5 – Схема ПЧ-АД с обратной связью по скорости
Необходимо произвести обоснование выбора и расчёт параметров структурной схемы используемого асинхронного двигателя MTКН 511-8.
В настоящее время существует несколько структурных схем асинхронного электродвигателя. Использование структурной схемы двигателя во вращающейся системе координат с ориентацией на вектор потокосцепления ротора, позволяет значительно упростить синтез системы управления, используя методы, хорошо проработанные в теории электроприводов постоянного тока.
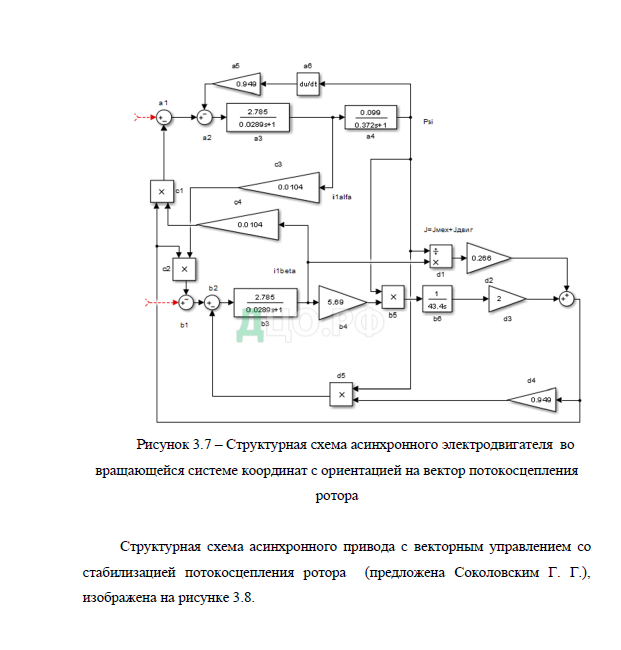
На рисунке 3.6 представлена структурная схема асинхронного электродвигателя во вращающейся системе координат с ориентацией на вектор потокосцепления ротора.
Рисунок 3.6 – Структурная схема асинхронного электродвигателя во вращающейся системе координат с ориентацией на вектор потокосцепления ротора
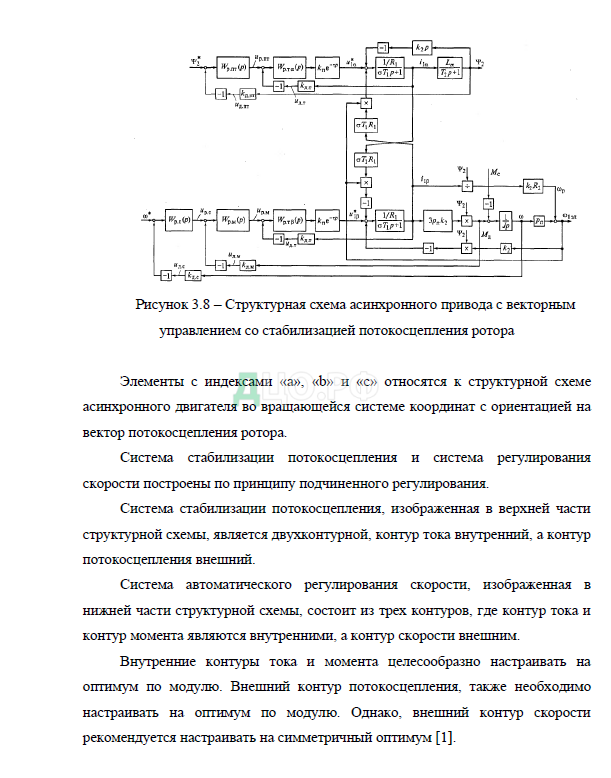
Элементы структурной схемы с индексом «а» относятся к каналу формирования потокосцепления ротора. Элементы с индексами «b» и «d» к каналу формирования скорости двигателя. Элементы с индексом «с» характеризуют перекрёстные взаимосвязи.
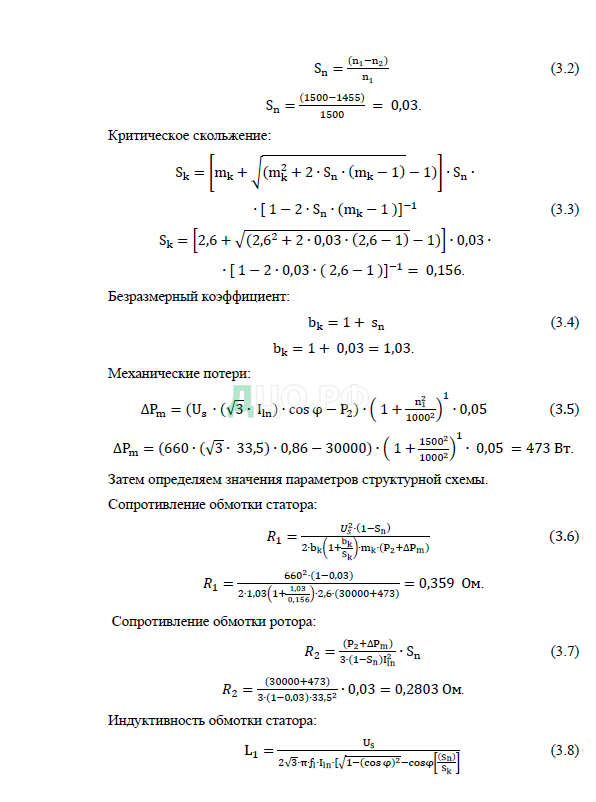
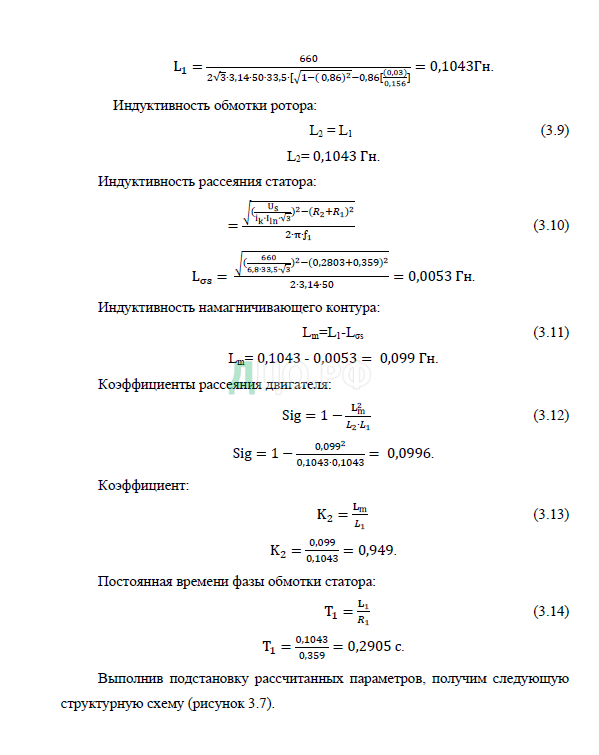
Расчет параметров данной структурной схемы проводится по каталожным данным двигателя.
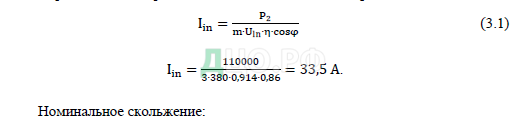
Первоначально определим номинальное значение фазного тока:
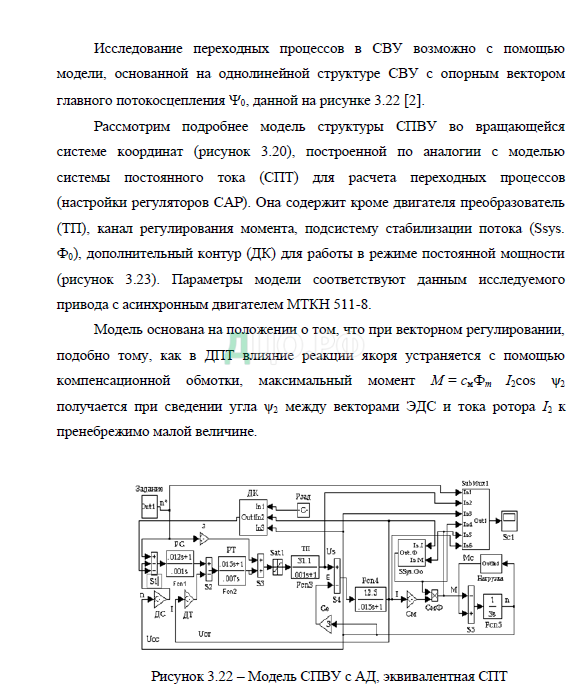
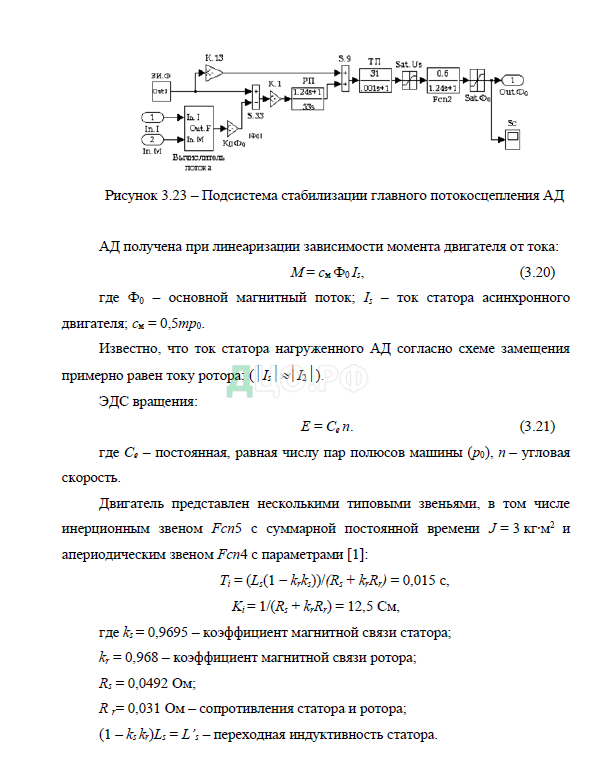
Компьютерное моделирование динамики СВУ с помощью рассмотренной модели привода с векторным управлением позволяет получить требуемый вид переходного процесса для оптимизации режима его работы.
Выводы
В данном разделе выпускной квалификационной работы произведено обоснование выбора необходимого технического обеспечения и разработка математической модели электропривода. Для исследуемого объекта решено применить схему частотно-регулируемого ЭП. В качестве канала регулирования выбирается контур, объектом в котором является электродвигатель привода подач станка с ЧПУ модели 16К20Т1, а регулируемым параметром – частота вращения привода (fвых).
В качестве преобразователя частоты решено применить модель ATV212HU40N4, которая хорошо зарекомендовала себя на рынке специальных технических средств.
Так же произведено построение математической модели электропривода и синтез регуляторов системы автоматического управления.