Вид работы: Контрольная работа
Предмет: Прикладная фотограмметрия
или напишите нам прямо сейчас:
⚠️ Пожалуйста, пишите в MAX или заполните форму выше.
В России Telegram и WhatsApp блокируют - сообщения могут не дойти.
Министерство образования и науки Российской Федерации
Московский государственный университет геодезии и картографии (МИИГАиК)
Для студентов специальности
120101.65 — прикладная геодезия
и направления
21.03.02 – Землеустройство и кадастры
Методическое пособие написано в соответствии с утверждёнными программами курса «фотограмметрия» по специальностям «прикладная геодезия», «городской кадастр» и «картография», рекомендовано кафедрой фотограмметрии и утверждено к изданию методической комиссией факультета дистанционных форм обучения МИИГАиК.
В методическом пособии изложены основные разделы теоретического курса «фотограмметрия» и контрольная работа, даны рекомендации по её выполнению.
Содержание
Введение………………………………………………………………………………………………………………с. 4
Рабочая программа дисциплины «Фотограмметрия»
для специальности «Прикладная геодезия»……………………………………………………………5
Рабочая программа дисциплины «Фотограмметрия и дистанционное зондирование
территории» для специальности «Городской кадастр»……………………………………………….8
Рабочая программа дисциплины «Фотограмметрия»
для специальности «Картография»………………………………………………………………………11
- Фотограмметрия и области её применения………………………………………………………..13
- Основные события в истории фотограмметрии………………………………………………….14
- Цифровые карты (планы)…………………………………………………………………………………..18
- Цифровая фотограмметрическая система…………………………………………………………..19
- Стереопара и стереоскопическая модель……………………………………………………………21
- Условия получения стереопары и способы наблюдения стереомодели……………….23
- Способы стереоскопического измерения снимков……………………………………………..24
- Основные элементы центральной перспективной проекции
кадрового фотоснимка………………………………………………………………………………………25
- Рабочие площади снимка и стереопары……………………………………………………………..27
- Системы координат, применяемые при фотограмметрической
обработке снимков……………………………………………………………………………………………27
- Система координат фотограмметрического сканера…………………………………..29
- Система координат снимка. Элементы внутреннего
ориентирования снимка……………………………………………………………………………………30
- Особенности измерения координат на цифровом снимке…………………………………..32
- Система координат объекта. Элементы внешнего ориентирования
снимка……………………………………………………………………………………………………………..33
- Элементы внешнего ориентирования пары снимков…………………………………………..35
- Системы координат модели объекта.
Элементы взаимного ориентирования пары снимков…………………………………………36
- Продольный и поперечный параллаксы……………………………………………………………..37
- Точность определения координат точек объекта
по измерениям стереопары……………………………………………………………………………….38
- Технологическая схема стереофотограмметрической съёмки……………………………..40
- Фототриангуляция…………………………………………………………………………………………….42
- Фотограмметрическая обработка одиночной стереопары…………………………………..45
- Фотограмметрическая обработка одиночного снимка………………………………………..47
- Цифровая модель рельефа местности. Матрица высот……………………………………….48
- Фототрансформирование снимков…………………………………………………………………….50
- Принцип цифрового ортофототрансформирования снимков………………………………51
- Цифровое ортофототрансформирование снимков равнинной местности…………….54
- Монтирование фотоплана………………………………………………………………………………….55
- Съёмка рельефа и контуров……………………………………………………………………………….56
- Наземная стереофотограмметрическая съёмка…………………………………………………..58
- Кадастровые картографические документы……………………………………………………….68
Литература……………………………………………………………………………………………………………..69
Контрольная работа………………………………………………………………………………………………..70
Введение
Курс «Фотограмметрия» изучается студентами-заочниками с целью освоения теоретических основ и приобретения практических навыков по использованию методов и технических средств фотограмметрии применительно к получению топографической информации о местности и к решению разнообразных не топографических задач.
Согласно учебному плану студенты-заочники специальностей «прикладная геодезия», «городской кадастр» и «картография» должны изучить теоретическую часть дисциплины «Фотограмметрия», выполнить контрольную и курсовую работы.
Контрольную работу студенты выполняют самостоятельно до прибытия в вуз на сессию и присылают её в деканат на проверку. Чтобы выполнить задания контрольной работы, необходимо изучить теоретические разделы данного методического пособия и рекомендации по выполнению этих заданий.
Закрепление теоретического курса и освоение практических навыков фотограмметрической обработки снимков студенты выполняют в вузе во время лабораторно-экзаменационной сессии. В период сессии студенты выполняют и защищают курсовую работу. Положительные результаты защиты курсовой работы оцениваются зачетом.
При положительных оценках контрольной и курсовой работ студенты допускаются к сдаче экзамена.
РАБОЧАЯ ПРОГРАММА дисциплины «фотограмметрия»
Рекомендуется для направления подготовки дипломированного специалиста 120100 — Геодезия, специальность 120101.65 — Прикладная геодезия
ЦЕЛЬ И ЗАДАЧИ ДИСЦИПЛИНЫ
Целью дисциплины является изучение теории фотограмметрии, методов и технологий получения и фотограмметрической обработки аэрокосмических снимков для создания и обновления топографических и кадастровых карт и других документов о местности.
Задачи дисциплины — приобретение студентами знаний и навыков, достаточных для планирования комплекса работ по фотограмметрической обработке снимков, получаемых аэрокосмическими и наземными съёмочными системами.
ТРЕБОВАНИЯ К УРОВНЮ ОСВОЕНИЯ СОДЕРЖАНИЯ
ДИСЦИПЛИНЫ
Изучившие дисциплину «Фотограмметрия» должны знать:
— теоретические основы фотограмметрии;
— методы и системы, используемые при фотограмметрической обработке снимков;
— технологии создания и обновления топографических карт и планов.
Изучившие дисциплину «Фотограмметрия» должны уметь:
— обосновать варианты технологий создания и обновления топографических и кадастровых карт и планов фотограмметрическими методами;
— выполнять весь комплекс фотограмметрических работ.
СОДЕРЖАНИЕ ДИСЦИПЛИНЫ
Введение
Фотограмметрия и области ее применения.
Краткий обзор истории фотограмметрии. Роль российских ученых и инженеров в развитии фотограмметрии.
Геометрические свойства аэрокосмических и наземных снимков,
получаемых кадровыми и сканерными съёмочными системами
Принципы построения изображений снимаемых объектов кадровыми и сканерными съёмочными системами. Геометрические свойства снимков, получаемых кадровыми и сканерными съёмочными системами. Методы получения стереопар кадровых и сканерных снимков.
Теория одиночного кадрового снимка
Системы координат кадрового снимка и объекта съёмки, применяемые в фотограмметрии. Элементы внутреннего и внешнего ориентирования кадрового снимка. Методы и фотограмметрические системы, применяемые для измерения координат точек на аналоговых и цифровых одиночных снимках. Преобразование аналоговых снимков в цифровую форму. Фотограмметрические сканеры. Системы координат цифровых изображений. Внутреннее ориентирование кадровых снимков. Учет систематических погрешностей снимка из-за дисторсии объектива, деформации фотоматериала и рефракции атмосферы при выполнении процесса внутреннего ориентирования. Формулы связи координат соответственных точек снимка и местности. Формулы связи координат соответственных точек на наклонном и горизонтальном снимках, полученных из одной точки фотографирования. Влияние погрешностей высот точек объекта на точность определения их плановых координат по одиночному снимку. Масштабы снимка. Определение элементов ориентирования снимка по опорным точкам.
Теория пары кадровых снимков
Бинокулярное зрение. Методы стереоскопического наблюдения и измерения аналоговых и цифровых снимков. Координаты и параллаксы соответственных точек на стереопаре снимков. Формулы связи координат точек местности и координат их изображений на паре кадровых снимков. Определение координат точек местности по паре снимков методом двойной обратной фотограмметрической засечки. Условие, уравнения и элементы взаимного ориентирования снимков. Определение элементов взаимного ориентирования. Построение фотограмметрической модели. Внешнее ориентирование фотограмметрической модели. Элементы внешнего ориентирования модели. Определение элементов внешнего ориентирования модели и элементов внешнего ориентирования пары снимков по опорным точкам. Точность определения координат точек местности по паре кадровых снимков.
Стереофотограмметрические системы
Назначение и классификация стереофотограмметрических систем.
Цифровые и аналитические стереофотограмметрические системы.
Принципы автоматической идентификации соответственных точек на стереопаре снимков на цифровых стереофотограмметрических системах.
Алгоритмы и методы выполнения процессов внутреннего и взаимного ориентирования кадровых снимков, построения и внешнего ориентирования фотограмметрической модели на цифровых и аналитических стереофотограмметрических системах.
Построение цифровых моделей рельефа и контуров на стереофотограмметрических системах.
Трансформирование кадровых снимков
Назначение и методы трансформирования снимков. Цифровое трансформирование снимков в ортогональную проекцию и в проекцию карты. Создание фотопланов по перекрывающимся снимкам. Оценка точности трансформированных изображений.
Пространственная фототриангуляция
Назначение и классификация методов пространственной фототриангуляции. Теория маршрутной и блочной пространственной фототриангуляции. Методы исключения систематических погрешностей снимка при построении пространственной фототриангуляции. Особенности построения сетей пространственной фототриангуляции с использованием значений линейных и угловых элементов внешнего ориентирования, определенных в полете с помощью инерциальных и GPS систем. Точность пространственной фототриангуляции. Технологии построения сетей пространственной фототриангуляции.
Наземная фотограмметрия
Фотограмметрические и цифровые съёмочные камеры, при меняемые в наземной фотограмметрии. Фотограмметрическая калибровка съёмочных камер.
Основные случаи стереофотограмметрической съёмки. Особенности фотограмметрической обработки одиночных и стереопар наземных снимков. Использование известных значений элементов внешнего ориентирования и других опорных данных при фотограмметрической обработке наземных снимков.
Точность наземной стереофотограмметрической съёмки. Выбор оптимальных параметров наземной стереофотограмметрической съёмки.
Фотограмметрические и стереофотограмметрические методы наземной съёмки статических и динамических объектов.
Трехмерные лазерные сканеры и их применение в наземной фотограмметрии. Принцип формирования дискретной трехмерной модели объекта съёмки трехмерным лазерным сканером. Внешнее ориентирование трехмерной модели по опорным точкам. Объединение и внешнее ориентирование отдельных дискретных моделей в общую модель объекта. Создание цифровых моделей рельефа и цифровых векторных моделей объекта по материалам трехмерного лазерного сканирования. Комбинированная фотограмметрическая обработка материалов трехмерного лазерного сканирования и фотографической съёмки объекта.
Применение методов наземной фотограмметрии в топографии, промышленности, архитектуре и строительстве.
Фотограмметрическая обработка одиночных и стереопар
аэрокосмических сканерных снимков
Классификация аэрокосмических сканерных съёмочных систем.
Системы координат сканерных съёмочных систем: оптико-механических и оптико-электронных сканеров, лазерно-локационных съёмочных систем. Элементы внешнего ориентирования сканерных съёмочных систем. Системы координат сканерных снимков.
Методы фотограмметрической обработки одиночных и стереопар сканерных снимков.
Особенности цифрового трансформирования сканерных снимков.
РАБОЧАЯ ПРОГРАММА дисциплины «Фотограмметрия и дистанционное зондирование территории»
Рекомендуется для направления подготовки дипломированного специалиста 120300 — Землеустройство и кадастры,
специальность 120303.65 — Городской кадастр
ЦЕЛЬ И ЗАДАЧИ ДИСЦИПЛИНЫ
Целью дисциплины является изучение теории фотограмметрии, методов и технологий получения и фотограмметрической обработки аэрокосмических снимков для создания и обновления топографических и кадастровых карт и других документов о местности.
Задачи дисциплины — приобретение студентами знаний и навыков, достаточных для планирования комплекса работ по фотограмметрической обработке снимков получаемых аэрокосмическими и съёмочными системами.
ТРЕБОВАНИЯ К УРОВНЮ ОСВОЕНИЯ СОДЕРЖАНИЯ
ДИСЦИПЛИНЫ
Изучившие дисциплину «Фотограмметрия и дистанционное зондирование территорий» должны знать:
— теоретические основы фотограмметрии;
— методы и системы, используемые при фотограмметрической обработке снимков;
— технологии создания и обновления топографических карт и планов;
Изучившие дисциплину «Фотограмметрия» должны уметь:
— обосновать варианты технологий создания и обновления топографических и кадастровых карт и планов фотограмметрическими методами;
— выполнять весь комплекс фотограмметрических работ.
СОДЕРЖАНИЕ ДИСЦИПЛИНЫ
Введение
Фотограмметрия и области ее применения.
Краткий обзор истории фотограмметрии. Роль российских ученых и инженеров в развитии фотограмметрии.
Геометрические свойства аэрокосмических и наземных снимков,
получаемых кадровыми и сканерными съёмочными системами
Принципы построения изображений снимаемых объектов кадровыми и сканерными съёмочными системами. Геометрические свойства снимков, получаемых кадровыми и сканерными съёмочными системами. Методы получения стереопар кадровых и сканерных снимков.
Теория одиночного кадрового снимка
Системы координат кадрового снимка и объекта съёмки, применяемые в фотограмметрии. Элементы внутреннего и внешнего ориентирования кадрового снимка. Методы и фотограмметрические системы, применяемые для измерения координат точек на аналоговых и цифровых одиночных снимках. Преобразование аналоговых снимков в цифровую форму. Фотограмметрические сканеры. Системы координат цифровых изображений. Внутреннее ориентирование кадровых снимков. Учет систематических погрешностей снимка из-за дисторсии объектива, деформации фотоматериала и рефракции атмосферы при выполнении процесса внутреннего ориентирования. Формулы связи координат соответственных точек снимка и местности. Формулы связи координат соответственных точек на наклонном и горизонтальном снимках, полученных из одной точки фотографирования. Влияние погрешностей высот точек объекта на точность определения их плановых координат по одиночному снимку. Масштабы снимка. Определение элементов ориентирования снимка по опорным точкам.
Теория пары кадровых снимков
Бинокулярное зрение. Методы стереоскопического наблюдения и измерения аналоговых и цифровых снимков. Координаты и параллаксы соответственных точек на стереопаре снимков. Формулы связи координат точек местности и координат их изображений на паре кадровых снимков. Определение координат точек местности по паре снимков методом двойной обратной фотограмметрической засечки. Условие, уравнения и элементы взаимного ориентирования снимков. Построение фотограмметрической модели. Внешнее ориентирование фотограмметрической модели. Элементы внешнего ориентирования модели. Определение элементов внешнего ориентирования модели и элементов внешнего ориентирования пары снимков по опорным точкам. Точность определения координат точек местности по паре кадровых снимков.
Стереофотограмметрические системы
Назначение и классификация стереофотограмметрических систем.
Цифровые и аналитические стереофотограмметрические системы.
Принципы автоматической идентификации соответственных точек на стереопаре снимков на цифровых стереофотограмметрических системах.
Алгоритмы и методы выполнения процессов внутреннего и взаимного ориентирования кадровых снимков, построения и внешнего ориентирования фотограмметрической модели на цифровых и аналитических стереофотограмметрических системах.
Построение цифровых моделей рельефа и контуров на стереофотограмметрических системах.
Трансформирование кадровых снимков
Назначение и методы трансформирования снимков. Цифровое трансформирование снимков в ортогональную проекцию и в проекцию карты. Создание фотопланов по перекрывающимся снимкам. Оценка точности трансформированных изображений. Цифровое трансформирование снимков застроенных территорий.
Пространственная фототриангуляция
Назначение и классификация методов пространственной фототриангуляции. Теория маршрутной и блочной пространственной фототриангуляции. Методы исключения систематических погрешностей снимка при построении пространственной фототриангуляции. Особенности построения сетей пространственной фототриангуляции с использованием значений линейных и угловых элементов внешнего ориентирования, определенных в полете с помощью инерциальных и GPS систем. Точность пространственной фототриангуляции. Технологии построения сетей пространственной фототриангуляции.
Фотограмметрическая обработка одиночных и стереопар
аэрокосмических сканерных снимков
Классификация аэрокосмических сканерных съёмочных систем. Системы координат сканерных съёмочных систем: оптико-механических и оптико-электронных сканеров, лазерно-локационных съёмочных систем. Элементы внешнего ориентирования сканерных съёмочных систем. Системы координат сканерных снимков.
Методы фотограмметрической обработки одиночных и стереопар сканерных снимков.
Особенности цифрового трансформирования сканерных снимков.
РАБОЧАЯ ПРОГРАММА дисциплины «фотограмметрия»
Рекомендуется для направления подготовки дипломированного специалиста по специальности 020501 — картография
ЦЕЛИ И ЗАДАЧИ ДИСЦИПЛИНЫ
Целью преподавания дисциплины «Фотограмметрия» студентам картографической специальности является обеспечение их знаниями методов фотограмметрической обработки снимков поверхностей Земли и других планет с целью создания карт разного назначения на эти поверхности.
В связи с тем, что аэрогеодезическое производство перешло на изготовление цифровых карт, которые наиболее оперативно создаются по аэрокосмическим и наземным снимкам, картографы должны знать современные методы цифровой фотограмметрической обработки этих снимков.
Задачи дисциплины — приобретение студентами знаний и навыков в области фотограмметрической обработки снимков на цифровых фотограмметрических системах с целью создания цифровых и графических карт разных масштабов и различного назначения по аэрокосмическим и наземным снимкам.
Для успешного освоения теоретических и практических основ «Фотограмметрии» студентам необходимы знания по дисциплинам: высшая математика, физика (раздел «Оптика»), геодезия, теория ошибок. Изучение дисциплины «Фотограмметрия» будет способствовать лучшему усвоению дисциплин: математическая картография, дешифрирование, геоинформационное картографирование, проектирование и составление карт.
ТРЕБОВАНИЯ К УРОВНЮ ОСВОЕНИЯ СОДЕРЖАНИЯ ДИСЦИПЛИНЫ
По окончании изучения курса «Фотограмметрия» студент картографической специальности должен иметь представление о современных технологиях и методиках фотограмметрической обработки наземных, аэро- и космических снимков с целью создания цифровых карт поверхности Земли и планет Солнечной системы.
СОДЕРЖАНИЕ ДИСЦИПЛИНЫ
Введение
Применение фотограмметрии в картографии и для решения научных и инженерных задач. Краткий исторический обзор развития фотограмметрии и роль отечественных ученых.
Стереоскопическое наблюдение и измерение снимков
Монокулярное и бинокулярное зрение. Способы наблюдения стереоскопической модели по паре перекрывающихся снимков. Свойства стереоскопической модели. Способы стереоскопического измерения стереопары снимков. Точность наведения измерительной марки на точки стереопары.
Фотограмметрические приборы и
цифровые фотограмметрические системы
Стереокомпараторы. Аналитические фотограмметрические приборы (АФП). Цифровые фотограмметрические системы (ЦФС).
Теория стереопары и одиночного снимка
Основные элементы центральной проекции и их свойства. Системы координат, применяемые в фотограмметрии. Элементы внутреннего и внешнего ориентирования снимка. Определение элементов внешнего ориентирования снимков во время съёмки.
Формулы связи координат соответственных точек местности и стереопары снимков. Продольный и поперечный параллаксы. Построение геометрической модели объекта по стереопаре и ее внешнее ориентирование. Формулы связи координат соответственных точек местности и снимка. Точность определения координат точек объекта по стереопаре. Источники ошибок при фотограмметрических измерениях.
Фототриангуляция
Назначение и классификация фототриангуляции. Способы построения маршрутной и блочной фототриангуляции. Точность фототриангуляции.
Трансформирование снимков. Монтирование ортофотоплана
Назначение и способы трансформирования снимков. Влияние угла наклона аэрофотоснимка и рельефа местности на положения точек на этом снимке. Цифровое трансформирование снимков. Монтирование цифрового ортофотоплана.
Создание и обновление топографических карт по аэрофотоснимкам
Стереотопографическая съёмка. Стереофотограмметрическая обработка снимков на ЦФС и АФП с целью создания карт и планов. Цифровые модели местности и их использование для создания карт и планов. Обновление топографических карт по аэроснимкам.
Создание и обновление топографических карт по наземным фотоснимкам
Применение наземной стереофотограмметрической съёмки для создания и обновления топографических карт и планов, а также для решения научных и инженерных задач. Полевое и камеральное оборудование. Полевые и камеральные работы. Теоретические основы фотограмметрической обработки наземных фотоснимков.
Создание и обновление карт по космическим снимкам
Использование космических снимков для создания и обновления карт. Особенности фотограмметрической обработки космических снимков.
- Фотограмметрия и области её ПРИМЕНЕНИя
Фотограмметрия позволяет определить по снимкам исследуемого объекта его форму, размеры и пространственное положение в заданной системе координат, а также его площадь, объём, различные сечения на момент съёмки и изменения их величин через заданный интервал времени.
Название дисциплины происходит от греческих слов photos (свет), gram-ma (запись) и metreo (измеряю), что в вольном переводе означает измерение изображений объектов, записанных с помощью света. Если хотят подчеркнуть, что при измерении использовалось объёмное изображение объекта, то на основе греческого слова stereo (пространственный) такие измерения называют стереоскопическими или стереофотограмметрическими.
Фотограмметрическая обработка снимков имеет следующие преимущества:
1) большая производительность труда благодаря тому, что измеряются не сами объекты, а их изображения. По снимкам объекта можно получить цифровую информацию о нём такой густоты, какой практически невозможно достичь при непосредственных промерах;
2) высокая точность измерений, т.к. съёмка объектов выполняется прецизионными фотокамерами, и снимки обрабатываются строгими методами с помощью компьютеров;
3) цифровую и графическую информацию об объекте можно получить, не вступая с ним в контакт, когда объект недоступен для человека или находится в среде, опасной для его жизни;
4) возможность получения в короткий срок информации о состоянии всего объекта и отдельных его частей;
5) возможность изучения не только неподвижных, но и движущихся объектов, а также скоротечных или медленно проходящих процессов;
6) оператор-фотограмметрист находится в благоприятных для человека камеральных условиях.
Фотограмметрия имеет тесные связи с другими дисциплинами — математикой, программированием, геодезией, картографией, электронной техникой, точным приборостроением, авиацией, космонавтикой, физикой, химией.
Фотограмметрию используют в различных областях науки, техники и производства, например:
— для определения деформаций сооружений и их отдельных частей, происходящих в ходе эксплуатации и с течением времени;
— для определения характеристик движущихся объектов;
— при изысканиях железных и автомобильных дорог, трасс трубопроводов, линий электропередач и других линейных объектов;
— при гидротехнических, гляциологических, геологических, географических изысканиях и исследованиях;
— при реставрации памятников архитектуры, скульптурных монументов, уникальных предметов;
— для фиксации и составления плана дорожно-транспортного происшествия или места преступления;
— для определения по снимкам, полученным в электронном микроскопе, характеристик микрорельефа;
— для лечения сетчатки глаз и установки контактных линз, изготовления зубных протезов, изучения внутренних органов человека и его внешней формы;
— при пошиве одежды с учётом индивидуальных особенностей строения тела человека;
— в военно-инженерном деле по снимкам определяют координаты ориентиров и целей, траекторию, скорость и другие параметры полёта снаряда, ракеты и других летящих объектов, составляют цифровые модели местности для обеспечения полёта низко летящих ракет и летательных аппаратов;
— снимки, полученные с искусственных спутников Земли, используют для составления прогнозов погоды, научного прогнозирования месторождений полезных ископаемых, изучения океанов и морей, определения характеристик снегового покрова, анализа сельскохозяйственного производства и охраны природной среды.
— широкое применение фотограмметрия получила при картографировании поверхности Земли, Луны, Венеры, Марса и других небесных тел.
Можно привести и другие примеры использования фотограмметрии.
- Основные события в истории фотограмметрии
Появлению фотограмметрии предшествовал многовековой период возникновения и совершенствования графического способа получения перспективных изображений местности и преобразования их в план. Для этого использовалась камера-обскура (темная), являвшаяся прообразом фотокамеры. Описания работы с ней имеются в трудах Леонардо да Винчи (Leonardo da Vinci, 1500 г.) и немецкого астронома и математика И.Кеплера (J.Kepler, 1611 г.). Для удобства работы на свету была разработана камера-клара (светлая). Швейцарец М.А.Каппелер (M.A.Cappeler) в 1725 г. нарисовал две панорамные картины с целью составления карты горного массива Пилатус. Для этого он впервые использовал принцип пространственной засечки, названной впоследствии фотограмметрической. В 1759 г. немецкий математик И.Г.Ламберт (I.H.Lambert), используя принцип пространственной засечки, изложил теоретические основы перспективных изображений объектов. В 1791-1793 гг. на основе этих разработок французский гидрограф Ш.Ф.Ботан-Бопре (Ch.F.Beautemps-Beaupre) провел съёмку камерой-клара территорий Вера Круз и Ван Дименсленд и составил планы с помощью разработанного им способа иконометрия (от греческого слова eikon — изображение). Однако требовался способ закрепления для длительного хранения изображения, полученного в камере-обскура. В 1839 г. француз Л.Ж.Дагер (L.J.Daguerre) и англичанин Ф.Талбот (F.Talbot) объявили о разработанных ими способах получения фотоизображений в камере-обскура, а английский астроном Д.Гершель (J.Herschel) впервые применил термин фотография. Дальнейшие достижения в фотографии и создании мобильных фотокамер открыли дорогу появлению фотограмметрии.
В 1852 г. французский топограф, инженер-майор Эмe Лосседа (Aime Laussedat) первым в мире выполнил фотосъёмку местности с целью создания по снимкам её плана. С этого года начинается история фотограмметрии, хотя это название появилось позже. Т.к. съёмка производилась для топографических целей, её назвали фототопографической. В 1858-1859 гг. под руководством Э.Лосседа с учётом набранного опыта была изготовлена первая в мире съёмочная система, приспособленная для наземных фототопографических съёмок и названная фототеодолит. Его конструкция представляла собой сочетание фотокамеры и теодолита.
В 1858 г. французский фотограф Ф.Турнашон (F.Tournachon), публиковавший свои статьи под псевдонимом Надар (Nadar), первым в мире выполнил фотосъёмку местности с воздушного шара. Он взял привилегию на воздушную фотосъёмку с целью определения границ земельных участков. Однако, столкнувшись со сложностями преобразования снимков в план, ограничился выполнением и рекламированием воздушной фотосъёмки.
В 1858 г. немецкий архитектор А.Мейденбауэр (F.Meydenbauer) использовал фотосъёмку для составления планов зданий и тем самым положил начало прикладному применению фотограмметрии, в данном случае в архитектуре. Он же в 1867 г. предложил название фотограмметрия.
В России 18 мая 1886 г. первую фотосъёмку с воздушного шара произвел поручик А.М.Кованько (впоследствии генерал-лейтенант). В этом же году В.И.Срезневский создал первый в России фотоаппарат, предназначенный для воздушной фотосъёмки и являющийся прототипом аэрофотоаппарата. Этим фотоаппаратом 6 июля 1886 г Л.Н.Зверинцев произвел фотосъёмку с воздушного шара, управляемого А.М.Кованько. Они пролетели от Санкт-Петербурга до Кронштадта и отметили возможность изучения по воздушным фотоснимкам рельефа дна.
В 1887-1889 гг. немецкий профессор К.Коппе (C.Koppe) создал фототеодолит, у которого впервые в мире на прикладной рамке были установлены координатные метки, которые закрепили на снимке координатную систему.
В начале 90-х годов 19 века инженер-поручик В.Ф.Найденов (впоследствии полковник, профессор Военно-инженерной академии (ВИА)) начал проводить работы с целью созданию планов местности по воздушным фотоснимкам и в 1907 г. написал первый русский учебник «Измерительная фотография и применение её к воздухоплаванию».
В 1891 г. инженер путей сообщений Н.О.Виллер впервые в России применил наземную фотосъёмку при изысканиях железных дорог на Кавказе.
В 1892 г. немец Ф.Штольц (F.Stolze) предложил для стереоскопических измерений снимков способ мнимой марки, который впоследствии стали использовать в большинстве стереофотограмметрических приборов, в том числе и на современных цифровых фотограмметрических системах.
В 1895-1896 гг. Ф.Н.Чернышев и академик Б.Б.Голицын провели наземные фототопографические съёмки на Новой Земле. В отчёте Б.Б.Голицын отметил, что по сравнению с мензульной съёмкой этот вид съёмки имеет преимущество во времени выполнения съёмки и в количестве измеряемых точек с одной постановки инструмента.
В конце 1896 г. и начале 1897 г. инженер МПС Р.Ю.Тиле находился в загранкомандировке, в которую его послали с целью изучения разработок в области фототопографии. Собранная информация была им издана в 1897 г. в трёх номерах журнала МПС, а затем в 1898 г. в брошюре «Практическая фототопография (фотограмметрия)». Сам Р.Ю.Тиле был назначен заведующим фототопографическими работами МПС. В 1908-1909 гг. он издал трёхтомную монографию «Фототопография в современном развитии», в которой впервые в России в единой связности описал историю развития фотограмметрии, её теоретические основы, съёмочное и обрабатывающее оборудование, применение фотограмметрии в различных областях деятельности человека.
В 1898 г. для съёмки с воздушного шара поручик С.А.Ульянин создал фотокамеру под названием «телеаппарат«, который в то время был наиболее совершенным и использовался в течение долгого времени.
В 1901 г. научный сотрудник немецкой фирмы Carl Zeiss К.Пульфрих (C.Pulfrich) разработал конструкцию стереокомпаратора, который был первым и самым высокоточным оптико-механическим стереофотограмметрическим прибором в течение 20 века. Кроме того, было положено начало существованию стереофотограмметрии.
В 1908 г. австрийский военный топограф Э.Орель (E.Orel) на основе стереокомпаратора разработал конструкцию первого стереофотограмметрического прибора для составления топографических карт по наземным фотоснимкам и дал ему название «автостереограф». В сотрудничестве с К.Пульфри-хом прибор был усовершенствован и под названием стереоавтограф серийно выпускался фирмой Carl Zeiss в разных модификациях до 70-х гг. 20 века.
В 1910 г. в России были выполнены первые опытные фотосъёмки с самолёта лётчиками Севастопольской школы; С.А.Ульянин создал первый в России фотоаппарат, предназначенный для съёмки с борта самолёта; С.М.Соловьев опубликовал брошюру «О стереофотограмметрии».
В 1911 г. прошли первые испытания и с 1913 г. началась эксплуатация первого в мире полуавтоматического плёночного аэрофотоаппарата полковника В.М.Потте. Конструкция этого аэрофотоаппарата была в то время лучшей в мире, и у нас он использовался до конца 20-х гг.
В 1915 г. в Германии М.Гассер (M.Gasser) сконструировал двойной проектор, который был первым фотограмметрическим прибором для создания топографических планов и карт по аэрофотоснимкам. Однако он не нашел применения, т.к. не было использовано стереоскопическое наблюдение и измерение снимков. Этот прибор положил начало созданию нового класса приборов — универсальных стереофотограмметрических приборов (УСП), которые позволяли оператору выполнить все процессы, связанные со съёмкой плановой и высотной частей топографической карты по аэроснимкам. В начале 20-х годов в Германии был создан автокартограф, у которого наблюдение и измерение снимков производились с использование стереозрения.
В 1917 г. в России Р.В.Животовский написал «Курс аэрофотограмметрии», что указывает на смену термина «воздушная фотосъёмка» на аэрофотосъёмку.
В России в 1920 г. Н.М.Алексапольский начал чтение курса по фотограмметрии в Московском межевом институте (ММИ), а в 1921 г. на геодезическом факультете ВИА. В 1925 г. под руководством Н.М.Алексапольского в ММИ была организована кафедра фотогеодезии (с 1939 г. фотограмметрии). Он же с 1932 г. был первым начальником кафедры фотограмметрии в ВИА. Н.М.Алексапольский был энтузиастом внедрения аэросъёмки в топографическое производство и своими работами способствовал развитию контурно-комбинированной съёмки. Совместно с П.П.Соколовым Н.М.Алексапольский разработал фототрансформатор МГИ.
В разработку теории фотограмметрии и фотограмметрического приборостроения, кроме упомянутых соотечественников, свой вклад внесли Ф.В.Дро-бышев, А.С.Скиридов, Н.Я.Бобир, Н.Н.Веселовский, Н.А.Урмаев, М.Д.Коншин, Г.В.Романовский, А.Н.Лобанов, В.Б.Дубиновский, Р.П.Овсянников, Е.И.Калан-таров и др. Ф.В.Дробышев создал линейку для построения координатной сетки, стереометр для рисовки горизонталей по стереопаре, стереограф для создания топографических карт по стереопарам аэроснимков и другие приборы. А.С.Скиридов получил авторские свидетельства (1927, 1929, 1933 гг.) на автоматическое вычерчивание горизонталей путём сравнения перемены плотностей фотоизображений вокруг соответственных точек на левом и правом фотоснимках. Только появление компьютеров позволило решить данную проблему. Н.Н.Веселовский был в числе первых, кто выполнял опытные производственные работы по аэросъёмке городов в крупных масштабах. Разработанные в ходе выполнения всех этих работ методики легли в основу подобных последующих съёмок. Н.А.Урмаев в 1941 г. опубликовал «Элементы фотограмметрии», где изложил теорию фотограмметрии с использованием векторной алгебры. Эта работа, стала основой для написания учебников и монографий по фотограмметрии. Труды М.Д.Коншина способствовали разработкам теории и технологии дифференцированного метода создания топографических карт. Его теория обработки аэроснимков с преобразованными связками проектирующих лучей позволила создать в середине 50-х гг. отечественные УСП: стереопроектор (Г.В.Романовский, Е.И.Калантаров и др.), стереограф (Ф.В.Дробышев). А.Н.Лобанов, В.Б.Дубиновский, Р.П.Овсянников своими работами способствовали внедрению в нашей стране аналитических методов обработки снимков с использованием вычислительной техники. Г.В.Романовский и Е.И.Калан-таров разработали автоматизированный стереокомпаратор СКА с инструментальной точностью 2 мкм.
В 1957 г. канадский фотограмметрист Ю.В.Хелава (U.V.Helava) на 1-м Международном фотограмметрическом съезде предложил создать аналитический фотограмметрический прибор. Первый в мире образец этого прибора, созданный фирмами OMI (Италия) и Bendix (США) под названием АР-1 (analytical plotter), был продемонстрирован в 1960 г. Конструкция прибора состояла из измерительного блока, в качестве которого был использован стереокомпаратор, компьютера и координатографа (графопостроителя). Программное обеспечение составил Ю.В.Хелава. Это было началом перехода фотограмметрии на использование компьютерной техники.
В 90-е годы 20 века произошел полный переход на компьютерные технологии и цифровую обработку снимков, полученных различными съёмочными системами. Компьютер с программным пакетом полной обработки снимков стал цифровой фотограмметрической системой. Появился термин цифровая фотограмметрия и новые виды картодокументов — цифровая карта, цифровой ортофотоплан, цифровая модель местности, цифровая модель рельефа. Был создан высокоточный фотограмметрический сканер, преобразующий в цифровую форму снимки, полученные с помощью аналоговой фотокамеры, с сохранением их геометрических, фотометрических и точностных характеристик. Аналоговые фотокамеры уступают место цифровым фотокамерам, позволяющим вводить снимки в компьютер без использования сканера.
Интересующиеся историей развития фотограмметрии в 19 — 20 веках могут прочитать об этом в Интернете: bvkras.narod.ru
- Цифровые карты (планы)
В настоящее время по аэро-, наземным и космическим снимкам карты (планы) создаются, хранятся, обновляются и передаются пользователям в цифровой форме. Прежняя графическая форма карт (планов) используется по просьбе пользователя или по другим причинам. Конечной продукцией, кроме цифровой карты (плана), может быть цифровой фотоплан и цифровая фотокарта, у которой информация в векторном виде наложена на растровое изображение. Также по снимкам создаются цифровые модели рельефа (ЦМР) и цифровые модели местности (ЦММ).
Цифровая карта, как и ее предшественница «бумажная карта», является моделью местности, объекты которой по координатам поворотных точек записаны в цифровом виде по определенным правилам. С одной стороны — это правила отображения графических объектов с определенными топологическими связями (точки, линии, полигоны, и т.д.), с другой стороны — это отображение объектов по правилам, которые предписывает классификатор (дома, дороги, леса, реки и т.д.).
Согласно [4]: Цифровая карта (ЦК) — цифровая картографическая модель, содержание которой соответствует содержанию карты определенного вида и масштаба.
В [5] дается определение цифровой модели местности, как множества, элементами которого являются топографо-геодезическая информация о местности и правила обращения с ней.
Оба понятия «цифровая карта» (ЦК) и «цифровые модели местности» (ЦММ) практически тождественны, с тем только отличием, что первый четко определяет содержание «модели» и показывает «картографическое» происхождение определения, а второй имеет претензию на более широкое толкование.
В [6] определена классификация цифровых карт по содержанию и назначению, например: цифровая топографическая карта, цифровая кадастровая карта, цифровая авиационная карта и др. Цифровая карта является основным продуктом картографического производства. Для ее создания, обновления, манипулирования с ней — решения картометрических задач, проектирования и т.д. используются автоматизированные картографические системы (АКС) и географические информационные системы (ГИС). Цифровая карта является базовой информационной основой ГИС и это новое качество существенно изменяет и расширяет области использования картографической продукции.
В начальный период перехода от «бумажной» карты к цифровой состоял в оцифровке картографических произведений на твердом носителе (бумага, пластик, разделенные копии на алюминиевой основе). Непродолжительное время для этого использовались дигитайзеры, сейчас твердые копии сканируют на планшетном или барабанном сканере, а затем оцифровывают (векторизуют) в различных графических редакторах, работающих с растрами.
В настоящее время основными способами создания и обновления (актуализации) ЦК являются:
— наземная тахеометрическая съёмка,
— наземная съёмка с использованием спутниковых систем глобального позиционирования,
— фотограмметрическая обработка данных аэрокосмической фотосъёмки,
— обработка данных воздушного лазерного сканирования.
Очевидно, что перечисленные выше способы создания и обновления ЦК используются, как самостоятельно, так и в комбинации, что обусловлено выбором оптимальной технологии.
Принадлежность цифровой карты к ГИС привела к тому, что перечисленные способы создания ЦК стали называть сбором пространственных данных.
Программной средой создания и обновления ЦК могут быть специализированные программы обработки пространственных данных (например — лазерного сканирования или тахеометрической съёмки), автоматизированные картографические системы, географические информационные системы, цифровые фотограмметрические системы (ЦФС). Наблюдается тенденция на интеграцию функциональных возможностей различных систем, например ЦФС с ГИС, как система сбора пространственных данных и манипулирования ими.
Цифровые карты позволяют создавать банки цифровой топографической и картографической информации, которая может быть использована многократно, полностью или частично по мере надобности.
- Цифровая фотограмметрическая система
В конце 20 века появление компьютеров с большими объёмами памяти и быстродействием, достижения в области компьютерной графики и цифровых методов записи изображений привели к созданию нового типа фотограмметрической техники — цифровой фотограмметрической системы (ЦФС), заменившей к началу 21 века оптико-механические и аналитические приборы.
ЦФС — это аппаратно-программный комплекс, предназначенный для фотограмметрической обработки аэрокосмической и наземной фотосъёмки. «Цифровой» фотограмметрическую систему назвали в связи с тем, что на ней обрабатываются изображения, представленные в цифровом виде. В ЦФС измеряют следующие снимки:
— кадровые аналоговые снимки, полученные на фотоплёнке в фотокамере и переведённые в цифровую форму на фотограмметрическом сканере;
— кадровые цифровые снимки, полученные цифровой фотокамерой;
— цифровые сканерные изображения, полученные аэро или космической сканерной системой;
— радиолокационные изображения, полученные радиолокаторами бокового (РЛБО) и кругового обзоров (РЛКО).
В данном методическом пособии рассматривается фотограмметрическая обработка только первых двух видов снимков.
Первые ЦФС появились в 80-х гг. прошлого века с появлением достаточно производительных персональных компьютеров и пришли на смену аналитическим фотограмметрическим приборам. Главным фактором перехода к цифровым системам является возможность автоматизации широкого круга задач фотограмметрической обработки снимков, полученных различными съёмочными системами: оптическими, оптико-механическими, оптико-электронными.
Внешне ЦФС (обобщённая блок-схема показана на рис. 1) отличается от персонального компьютера только наличием наблюдательной системы для стереоскопического наблюдения (см. с. 23-25), а для наведения измерительной марки на снимок или пространственную модель объекта кроме «мыши» могут быть использованы специальные манипуляторы, например: штурвалы, трекбол, специальные курсоры. Во всех системах наведение марки на точку выполняется как непосредственно оператором, так и с использованием коррелятора.
Функциональные возможности ЦФС определяются развитием ее программной составляющей, которая для решения широкого круга задач фотограмметрической обработки аэрокосмической и наземной фотосъёмки должна обеспечивать выполнение следующих процессов: фототриангуляция для блока снимков, стереовекторизация контурной части карты и каркасов для 3D-моделей зданий и сооружений, создание оригинала рельефа и других форм цифровой модели рельефа, создание фотоплана, векторизация по фотопланам.
В России среди систем широкого профиля используются отечественные ЦФС: «Талка», «Фотомод», украинская система «Дельта», известная в России под названием — ЦФС ЦНИИГАиК, зарубежные системы «Inpho» (Германия), «I/S-Intergraph», «DPW-Helava» (США) и др. Кроме названных систем существуют специализированные системы, которые предназначены для решения задач обработки только космических данных или применительно к решению задач прикладной фотограмметрии, например архитектуры.
Основными тенденциями развития ЦФС являются: автоматизация процессов измерения в фототриангуляции, построения ЦМР и ортофотопланов, интеграция с ГИС, совершенствование программ трехмерного моделирования.
- Стереопара и стереоскопическая модель
Использование восприятия человеком глубины при наблюдении и измерении снимков основано на том, что снимки построены по тем же законам перспективной, центральной проекции, что и изображения на сетчатках глаз. Два снимка, на которых изобразился один и тот же объект, называют стереоскопической парой или сокращённо стереопарой.
Предположим, что из двух точек SЛ и SП (рис. 2), отстоящих друг от друга на расстоянии, равном глазному базису bГ, были получены снимки РЛ и РП фотокамерой с фокусным расстоянием f, равным расстоянию наилучшего зрения d0. Если эти снимки установить перед глазами человека в такие же положения, в которых они находились во время съёмки, то точки снимков, являющиеся изображениями точек (М, N) объекта, спроектируются на сетчатки глаз (m, n и m’, n’) человека так, как будто он наблюдает этот объект. Разные отстояния точек M и N вызывают взаимные смещения их изображений на снимках. Эти смещения (m’n’) при рассматривании снимков преобразуются в физиологические параллаксы s, по величине и знаку которых головной мозг строит объёмный образ сфотографированного объекта. Наблюдаемое объёмное изображение называют стереоскопической моделью или стереомоделью. Изображения точки объекта на левом и правом снимках называют соответственными точками. Например, изображения точки М — точки m и m’, а изображения точки N — точки n и n’.
Реальные условия получения снимков не соответствуют параметрам зрения человека. В результате стереомодель не будет подобна сфотографированному объекту. Её вертикальный масштаб 1:mB будет отличаться от горизонтального масштаба 1:m. Соотношение между масштабами определяется формулой: . Например, при фокусном расстоянии фотокамеры f = 100 мм стереомодель будет вытянута вверх в 2,5 раза, а при f = 350 мм будет сжата в 0,7 раз. Изменение увеличения наблюдательной системы не изменяет этот коэффициент, т.к. оно одновременно изменяет как горизонтальный, так и вертикальный масштабы. В то же время вытягивание рельефа на стереомодели облегчает его восприятие, а также съёмку рельефа.
Другой особенностью стереомодели является то, что она вытягивается в сторону наблюдателя при перемещении головы человека влево-вправо относительно стереопары. Удаление (приближение) стереопары к глазам наблюдателя вызывает растяжение (сжатие) стереомодели. Небольшие развороты снимков относительно друг друга и относительно глаз человека приводят к наклонам и разворотам стереомодели в пространстве. Имеющиеся на снимках смещения точек, вызванные наклонами снимков и другими причинами, приводят к деформации стереомодели. Суммируя сказанное, нужно отметить, что стереомодель не является строгим подобием сфотографированного объекта. Однако из-за того, что на плановых снимках смещения точек, вызванные разными источниками, имеют сравнительно малые величины, наблюдаемая по этим снимкам стереомодель даёт, в целом, верное представление о рельефе местности.
Кроме термина стереомодель, используют другой термин — стереоэффект. Различают прямой, обратный и нулевой стереоэффекты. Прямой стереоэффект возникает при рассматривании левого снимка левым глазом, а правого — правым (рис. 3, а, перекрывающиеся части снимков покрыты сетчатым полем). Если снимки поменять местами (рис. 3, б), то физиологические параллаксы поменяют знак, и будет наблюдаться обратный стереоэффект, т.е., например, возвышенности будут восприниматься как углубления. Если оба снимка повернуть на 900 и сместить вверх-вниз относительно друг друга (рис. 3, в), то будет наблюдаться нулевой стереоэффект, т.е. два плоских изображения сольются в одно плоское. Это объясняется тем, что вдоль глазного базиса установятся ординаты точек, разности которых вызываются разными положениями снимков в пространстве, а не рельефом местности.
Измерения стереопары выполняют при прямом стереоэффекте. Обратный стереоэффект можно использовать при измерении узкой глубокой долины. В этом случае дно долины будет восприниматься как водораздел и чисто психологически марку будет легче наводить на него.
- Условия получения стереопары и
способы наблюдения стереомодели
Для получения стереопары нужно выполнить два условия.
- Снимки должны быть получены из разных точек пространства.
Условие является обязательным для получения измерительного стереоизображения.
- Разномасштабность снимков не должна быть более 16%.
Если на фотограмметрическом приборе можно изменять масштабы изображений каждого снимка стереопары независимо друг от друга, то это условие не является обязательным.
Для наблюдения объёмного изображения по стереопаре нужно выполнить два условия.
- Каждый глаз должен рассматривать только один снимок.
- Снимки необходимо развернуть в своих плоскостях так, чтобы линии, соединяющие соответственные точки на обоих снимках, были параллельны глазному базису.
Чтобы выполнить условие 1, используют следующие способы.
Оптический способ основан на рассматривании снимков через оптические системы. Простой оптической системой является зеркально-линзовый стереоскоп, который можно использовать и при обработке снимков на компьютере. В этом случае стереоскоп устанавливают перед экраном, на который одновременно выводят оба снимка: левый снимок — на левую половину экрана, а правый снимок — на правую половину.
Принцип анаглифического способа был публикован в 1853 г. В.Рольманом, но только в 1858 г. Дж.Д’Альмейде продемонстрировал получение объёмного изображения этим способом, а в 1891 г. Луи Дукас дю Орон изготовил первые стереооткрытки.
Снимки проектируют на экран одновременно, но в разных цветах: левый снимок — в красном цвете, а правый снимок — в сине-зелёном. Наблюдатель надевает очки, у которых перед левым глазом установлен красный светофильтр, а перед правым глазом — сине-зелёный. В результате каждый глаз будет видеть снимок с соответствующей окраской, и оператор будет наблюдать объёмное изображение. Недостатки способа: 1) наличие очков; 2) светофильтры должны быть тщательно подобраны по частотным характеристикам как между собой, так и с соответствующими изображениями на экране. Если это не соблюдается, то каждый глаз видит слабое изображение соседнего снимка; 3) потери света в светофильтрах; 4) при наблюдении цветных снимков происходит искажение цветовой гаммы. Способ используют при обработке снимков на ЦФС.
Способ чередования снимков (предложен Д’Альмейде в 1858 г.) основан на поочередном проектировании снимков на экран. С такой же частотой синхронно открывается левая или правая ветви наблюдательной системы. Для рассматривания стереоизображения применяют затворные очки с жидкокристаллическими фильтрами. Недостатки способа: 1) наличие очков; 2) потеря света в фильтрах. Этот способ используется при обработке снимков на ЦФС.
Поляроидный способ (предложен Ж.Андертоном в 1891 г.) основан на том, что снимки проектируют на экран одновременно через поляроидные светофильтры с углом поляризации между ними, равным 900. Наблюдатель надевает очки с поляроидными светофильтрами и с таким же углом поляризации. Недостатки способа: 1) наличие очков; 2) потеря света в поляроидах составляет 50%; 3) при отражении от экрана может происходить частичная деполяризация, что ухудшает стереоизображение. Данный способ используют при обработке снимков на ЦФС, но для этого применяют специальный монитор, у которого имеются два жидкокристаллических экрана, расположенных под 900 друг к другу. На каждый экран выводится один из снимков стереопары, но в поляризованном под 900 свете относительно друг друга. Между экранами расположена под углом 450 к каждому экрану полупрозрачная стеклянная пластина, которая позволяет оператору наблюдать оба изображения через поляроидные очки.
При растровом способе, предложенном Бертье и Лизегангом в 1896 г., два снимка проектируют на экран, составленный из линз цилиндрической формы. Оптические лучи, несущие изображения левого и правого снимков, отражаются противоположными гранями линз и попадают в соответствующий глаз наблюдателя. Недостатки способа: 1) из-за интерференции световых лучей нарушается равномерность освещения по полю стереоизображения; 2) ограничение размеров стереоизображения. Данный способ используют при безочковом просмотре стереокинокартин, а также при изготовлении объёмных открыток. В фотограмметрии этот способ не нашел применения.
- Способы стереоскопического измерения
снимков
Для стереоскопического измерения снимков используют два способа: мнимой марки и реальной марки.
Способ мнимой марки (рис. 4, а), предложенный Ф.Штольцем (Германия) в 1892 г., основан на том, что на каждый снимок стереопары проектируется одинаковое изображение измерительной марки. В результате наблюдатель каждым глазом видит участок снимка с маркой. Т.к. марки имеют одинаковую форму, размер и цвет, то при приближении к соответственным точкам они сливаются в одну мнимую стереоскопическую марку. При совмещении марок с соответственными точками (m и m’) стереоскопическая марка будет восприниматься лежащей на поверхности стереомодели в точке М. При смещении, например, правой марки с точки m’ на точку k’ стереоскопическая марка будет восприниматься перемещающейся по высоте в пространстве стереомодели с точки М на точку К. Следовательно, перемещая обе марки по снимкам и совмещая их с соответственными точками, можно измерить координаты точек в пространственной системе координат модели. Этот способ был использован К.Пульфрихом при конструировании стереокомпаратора — первого стереофотограмметрического прибора и применяется в большинстве стереофотограмметрических приборов и систем.
Способ реальной марки (рис. 4, б), предложенный канадским фотограмметристом Е.Девилем (E.Deville) в 1902 г., заключается в том, что в пространство стереомодели вводится экран, имеющий в центре светящуюся точку, которая служит реальной измерительной маркой. Этот способ не нашел широкого применения в фотограмметрии.
Форму, размер и цвет измерительной марки оператор устанавливает с учётом особенностей наблюдаемых изображений. Используемые формы марки это крест, точка, кольцо и др. Цвет марки устанавливают в зависимости от цвета снимков. При измерении чёрно-белых снимков цвет марки лучше устанавливать жёлтый или светло-зелёный, т.к. эти цвета позволяют хорошо наблюдать марку на темных участках и не утомляют глаза. На светлых участках можно использовать синий цвет. При использовании анаглифического способа цвет марки должен быть жёлтый, белый или чёрный.
- Основные элементы центральной перспективной
проекции кадрового фотоснимка
Кадровый фотоснимок представляет собой изображение объекта на плоскости в центральной перспективной проекции. Согласно законам построения изображения в этой проекции оптические лучи, идущие от точек объекта (на рис. 5 точки О, К, М) сходятся в передней узловой точке SП, расположенной в передней главной плоскости НП объектива на главном оптическом луче OSПSЗо. Точка SП является центром проекции в пространстве объекта.
Оптические лучи выходят из задней узловой точки SЗ объектива, расположенной на главном оптическом луче OSПSЗо в задней главной плоскости НЗ объектива. Точка SЗ является центром проекции в пространстве изображения. Выйдя из точки SЗ оптические лучи строят изображение точек (на рис. 5 точки о, k, m) объекта на фокальной поверхности объектива Ф, которая представляет собой сферическую поверхность. Расстояние от точки SЗ до фокальной поверхности называется фокусным расстоянием объектива fоб. В пределах фокальной поверхности устанавливается плоскость Р (плоскость снимка), в качестве которой может быть фотоплёнка или матрица, фиксирующие изображение объекта. Плоскость Р отстоит от точки SЗ на расстоянии, являющемся фокусным расстоянием фотокамеры fк.
Центры проекции SП и SЗ у объективов измерительных фотокамер отстоят друг от друга на расстоянии D, которое не учитывают при съёмке объектов, расположенных на большом расстоянии от фотокамеры, и обязательно учитывают при съёмке объектов с коротких отстояний.
Основные точки и линии центральной перспективной проекции, используемые далее в тексте, показаны на рис. 6 и даны их описания: где они располагаются и какие свойства имеют.
Р — плоскость наклонного снимка.
S — центр проекции. Из него получен наклонный снимок Р.
SO — главный оптический луч наклонного снимка — перпендикуляр к плоскости снимка Р.
о — главная точка наклонного снимка — точка пересечения главным оптическим лучом SO плоскости снимка.
So = f — фокусное расстояние снимка или фотокамеры fк.
SN — отвесная линия, перпендикуляр к поверхности относимости.
ÐoSn = a0 — угол наклона снимка, определяет отклонение главного оптического луча SO от отвесной линии SN.
Н = SN — высота фотографирования.
n — точка надира на наклонном снимке — точка пересечения этого снимка отвесной линией SN. В точке надира сходятся изображения вертикальных линий на местности (например, изображения деревьев, углов зданий). Расстояние этой точки от главной точки on = -f tga0.
- Рабочие площади снимка и стереопары
Реальные объективы вызывают ухудшение геометрии построения и качества изображения по мере смещения от центра к краю снимка. Поэтому при фотограмметрической обработке снимков используют центральные части снимков, которые называют рабочими площадями.
Рабочая площадь снимка (на рис. 7, а она заштрихована) это его центральная часть, ограниченная линиями, проходящими посредине продольных и поперечных перекрытий. При 60% продольном и 40% поперечном перекрытиях линии будут проходить от краев снимка на расстояниях, равных 30% и 20% от длины стороны снимка, соответственно. Следовательно, рабочая площадь будет иметь форму прямоугольника, вытянутого в поперечном направлении, со сторонами, составляющими 40% и 60% от длин сторон снимка.
На стереопарах также выделяют рабочие площади, в пределах которых вычерчивают контуры и горизонтали, а на границах соседних рабочих площадей выполняют их сводку. Рабочая площадь стереопары это центральная часть продольного перекрытия двух снимков, ограниченная линиями, проходящими посредине поперечных и тройных продольных перекрытий. На рис. 7, б изображены три снимка: 1, 2 и 3, составляющие соседние стереопары. Стереопары перекрываются в пределах зоны тройного продольного перекрытия снимков, где находится главная точка снимка 2. Следовательно, левые и правые границы рабочих площадей стереопар должны проходить примерно через центральные точки 1, 2 и 3-го снимков. При продольном перекрытии 60% расстояния между ними составляют 40% от длины продольной стороны снимка. Верхняя и нижняя границы рабочих площадей стереопар при поперечном перекрытии 40% проходят от соответствующих краев снимков на расстояниях, составляющих 20% от длины стороны снимка.
- Системы координат, применяемые при
фотограмметрической обработке снимков
При фотограмметрической обработке снимков используют следующие системы координат.
«Глобальные» (планетарные, пространственные):
— геоцентрическая: эллипсоидальная, геодезическая (B, L, H) или прямоугольная (X, Y, Z), применяются для привязки опознаков при обработке космических снимков и данных спутниковых наблюдений;
— топоцентрическая (X, Y, Z) применяется при обработке обширных блоков снимков с началом системы координат, расположенном на земной поверхности примерно в центре территории, изобразившейся на блоке снимков.
Картографические (плоские, прямоугольные):
— Гаусса-Крюгера,
— UTM (Универсальная проекция Меркатора),
— и др.
При создании топографических карт используют следующие системы координат:
местные (региональные) — производные от «картографических» или произвольно заданные, применяются при создании картодокументов о местности регионального значения;
системы координат объекта — пространственные, прямоугольные, связанные с объектом, применяются при решении прикладных задач.
Фотограмметрические (пространственные, прямоугольные):
— система координат снимка (аналогового и цифрового), применяется для изменений координат точек на снимке,
— система координат фотограмметрической модели (для пары снимков или для блока снимков), применяется для построения свободной фотограмметрической модели, подобной снимаемому объекту.
Т.к. фотограмметрическая обработка снимков заключается в преобразовании координат из одной системы координат в другую, необходимо обратить особое внимание на данный раздел. Запомнив, как задаётся положение каждой из указанных систем координат, и каково их взаимное положение, легче понять описываемые в дальнейшем процессы перехода из одной системы координат в другую. В большинстве случаев используются приведённые в справочниках по математике формулы преобразования пространственных координат.
На рис. 8 приведена технологическая схема преобразований координат при обработке стереопары и одиночного снимка.
Координаты точек стереопары вначале переводят из системы координат c’x’y’z’ сканера в системы координат левого o’ЛxЛyЛzЛ и правого o’ПxПyПzП снимков, а затем в системы координат SЛxЛyЛzЛ и SПxПyПzП с началами в центрах проекции SЛ и SП, соответственно.
Для снимка преобразование выполняется аналогично: сначала из системы координат c’x’y’z’ сканера в систему координат o’xyz снимка, а затем во вторую систему координат Sxyz с началом в центре проекции S.
Если снимок получен с помощью цифровой фотокамеры, то сразу выполняется переход из системы координат c’x’y’z’ матрицы ПЗС в системы координат SЛxЛyЛzЛ и SПxПyПzП для пары снимков и в систему координат Sxyz для одиночного снимка (указано пунктирной линией).
Координаты точек стереопары и снимка можно преобразовать сразу в систему координат OXYZ объекта, если известны с достаточной точностью элементы внешнего ориентирования снимков, определяющие их положения в пространстве координат объекта (преобразование обозначено цифрой 0).
Если элементы внешнего ориентирования одиночного снимка неизвестны или известны с недостаточной точностью, то с помощью опорных точек, координаты которых известны в системе координат объекта, вычисляют элементы внешнего ориентирования снимка, а затем осуществляют переход в систему координат OXYZ объекта (этот вариант обозначен цифрой 1).
Для стереопары при таких же условиях координаты точек пересчитывают из систем координат SЛxЛyЛzЛ и SПxПyПzП в систему координат SЛXМYМZМ модели объекта. Затем, используя опорные точки, вычисляют элементы внешнего ориентирования модели и пересчитывают координаты из системы координат SЛXМYМZМ модели в систему координат OXYZ объекта (этот вариант обозначен цифрой 1).
- система координат фотограмметрического
сканера
Для того чтобы аналоговый снимок можно было обработать с помощью компьютера, его нужно преобразовать на фотограмметрическом сканере в цифровую форму. Система координат сканера c’x’y’ (рис. 9) задаётся направляющей (y’) и перемещающейся по ней кареткой x’, расположенной под углом 900 к направляющей. На каретке закреплена светочувствительная линейка ПЗС (прибор с зарядовой связью). ПЗС состоит из квадратов-пикселей, содержащих информацию об оптической плотности и цвете (три основных цвета: красный, зелёный, синий) данного участка изображения. Изменение оптической плотности от белого до чёрного цвета задаётся цифрами от 0 до 256, 512 или 1024. Также задаются три основных цвета.
Чтобы устранить геометрические искажения, вносимые фотограмметрическим сканером, его тщательно калибруют и юстируют перед выполнением сканирования фотофильма. Для фотограмметрического сканера точность позиционирования каждого пикселя изображения должна быть не больше 2-3 мкм, а минимальный размер пикселя оптического разрешения равен 5-8 мкм. Для сравнения скажем, что точность позиционирования пикселя для обычного планшетного полиграфического сканера в десятки раз хуже.
Калибровку сканера периодически выполняют по контрольной сетке, представляющей собой стеклянную пластинку с выгравированными на ней взаимно перпендикулярными линиями, отстоящими друг от друга на расстоянии 10 или 5 мм. Точность нанесения линий равна 1 мкм. Инструментальные погрешности (разномасштабность, неперпендикулярность и др.) записываются в память сканера и при сканировании снимков их используют для введения в координаты точек снимков.
При сканировании аналогового изображения следует правильно выбрать размер пикселя сканирования, и он должен соответствовать разрешающей способности снимка. Если интегральная разрешающая способность фотоснимка (плёнка + объектив) R = 50 лин/мм, размер пикселя должен быть Δ = 1/2R = 0,01 мм. Сканирование с меньшим разрешением нерационально, поскольку это никак не повышает точность измерений, а лишь только увеличивает размер снимка и приводит к расходу ресурсов памяти и времени на обработку.
В результате сканирования получается цифровой снимок, координаты точек которого записаны в системе координат сканера. При дальнейшей обработке их преобразуют в систему координат снимка.
- Система координат снимка. Элементы
внутреннего ориентирования снимка
Началом пространственной прямоугольной системы координат кадрового снимка является центр проекции S (см. рис. 5 и 6). Измерения координат точек объекта на кадровом снимке выполняются в системе координат снимка, которая задается либо координатными метками на аналоговом снимке, либо системой координат матрицы цифровой фотокамеры.
На аналоговом снимке (рис. 10, а) четыре координатные метки располагаются либо посредине каждой стороны снимка, либо в его углах. Координатные метки имеют вид креста или крестообразных штрихов с точкой посредине. Ось x снимка проходит через метки 1 и 2 и направлена вдоль полета носителя. Началом системы координат служит точка о’ пересечения оси х линией, соединяющей метки 3 и 4. Ось у проходит через точку о’ перпендикулярно к оси х, а ось z — через точку о’ перпендикулярно к плоскости xy. Положительное направление оси х задают от метки 1 к метке 2, оси у — от метки 4 к метке 3, а оси z — вверх от плоскости xy.
Для цифрового изображения метки не нужны, поскольку положение каждого пикселя определено в ортогональной системе координат матрицы o’xyz (рис. 10, б).
Две системы координат снимка Sxyz и o’xyz параллельны и имеют параметры смещения относительно друг друга: x0, у0, f, где x0 и у0 координаты главной точки о в системе координат o’xyz, а f — фокусное расстояние фотокамеры. Параметры x0, у0, f называют элементами внутреннего ориентирования снимка.
Элементы внутреннего ориентирования определяют в процессе калибровки фотокамеры. Также в процессе калибровки определяют параметры дисторсии фотокамеры, которая характеризует нарушение ортоскопии при построении изображения. Дисторсия может быть задана в виде поправок или коэффициентов полинома.
Поскольку элементы внутреннего ориентирования определяют в системе координат снимка o’xyz положение центра проекции S, т.е. положение точки через которую проходят все проектирующие лучи, то говорят, что элементы внутреннего ориентирования позволяют восстановить связку проектирующих лучей. Поскольку дисторсия описывает свойства проектирующих лучей, то и её также относят к элементам внутреннего ориентирования фотокамеры.
- особенности измерения координат на
цифровом снимке
Цифровое изображение представляет собой прямоугольную матрицу, каждый элемент которой – пиксель — имеет свое определенное положение, заданное номером столбца j и строки i, которые в силу своей прямоугольной структуры и задают систему координат цифрового изображения (рис. 11, а).
Эта система координат — левая. Начало координат находится в левом верхнем углу (точка с’), где расположен нулевой пиксель. Ось xj направлена вправо и вдоль неё идёт счёт столбцов j. Ось yi направлена вниз и вдоль неё идёт счёт строк i. Координаты центра любого пикселя определяются так:
xj = j + 0,5, yi = i + 0,5,
где j и i – номера столбца и строки матрицы цифрового изображения. Для закрашенного пикселя (j = 5, i = 3) координаты будут xj = 5,5 и yi = 3,5.
Для перехода от пиксельных координат к метрическим координатам нужно умножить пиксельные координаты на метрический размер пикселя D, заданный при сканировании снимка или при изготовлении матрицы цифровой фотокамеры, т.е.
x’ = D´xj и y’ = D´yi.
Если D = 10 мкм, то метрические координаты закрашенного пикселя будут
x’ = 5,5´10 = 55 мкм и y’ = 3,5´10 = 35 мкм.
В ЦФС часто систему координат исходной матрицы цифрового изображения пересчитывают из левой системы в правую, перенося начало системы координат из левого верхнего в левый нижний угол. В результате оси метрических координат будут иметь направления: ось xj — вправо, а ось yi — вверх.
В ЦФС измерения цифрового изображения выполняются на экране монитора путём позиционирования измерительной марки на точку изображения. При выводе на экран цифрового изображения в масштабе 1:1 (такой вывод еще называется истинный размер) пиксель исходного изображения совпадает с пикселем экрана монитора. В этом случае, если размер пикселя исходного изображения, например, равен 12 мкм, а размер пикселя экрана монитора — 240 мкм, то отображение изображения на экране монитора соответствует оптическому увеличению 20 крат. При таком увеличении дискретность перемещения измерительной марки равна пикселю и, соответственно, измеренные координаты будут зафиксированы до одного пикселя.
Увеличение точности измерения координат можно достичь за счет увеличения исходного изображения в n раз. В этом случае один пиксель исходного изображения отображается в нескольких пикселях экрана монитора, например, при увеличении 2:1 на 4 пикселях монитора, 3:1 на 9 пикселях и т.д. Пропорционально увеличению увеличивается дискретность перемещения измерительной марки, а значит и точность фиксирования координат. Координаты увеличенного изображения определяются по формулам:
На рис. 11, б показано, как при увеличении в 4 раза пиксель исходного изображения отображается на 16 пикселях монитора. На исходной матрице закрашенный пиксель имеет нумерацию j = 5, i = 3. На подматрице закрашенный пиксель имеет нумерацию j’ = 2, i’ = 1. Следовательно, пиксельные координаты центра закрашенного пикселя подматрицы будут
xj = 5+ = 5,625, yi = 3+ = 3,375,
а метрические координаты при D = 10 мкм будут x’ = 56,25 мкм, y’ = 33,75 мкм.
Однако за счет увеличения изображения увеличивать точность измерений до бесконечности нельзя. Максимально разумные увеличения 2-3 крата. Дальнейшее увеличение приводит к потере измеряемых объектов (точек), т.к. на экране появляются изображения пикселей, а изображение объекта размывается. Однако оператору необходимо измерять не пиксели, а объект (некий образ), который складывается из множества пикселей.
Достижение подпиксельной точности возможно не только за счет увеличения изображения. В настоящее время существуют алгоритмы, позволяющие выполнять виртуальный пересчет матрицы исходного изображения относительно положения измерительной марки, и таким образом увеличивать точность измерений.
- Система координат объекта
Элементы внешнего ориентирования снимка
Положение снимка в пространстве в момент фотографирования определяют элементы внешнего ориентирования. Под понятием снимок надо подразумевать связку проектирующих лучей, восстановленную на этапе внутреннего ориентирования, когда были заданы элементы внутреннего ориентирования снимка x0, y0, f и определено положение центра проекции S относительно системы координат снимка P. Если рассмотреть связку проектирующих лучей как «твердое тело», то положение твердого тела в пространстве в декартовой системе координат определяют 6 параметров. Поскольку связка построена в системе координат снимка, то эти параметры, суть параметры связи двух пространственных прямоугольных систем координат. Таким образом, для ориентирования системы координат снимка относительно системы координат объекта необходимо знать шесть элементов внешнего ориентирования снимка.
Элементами внешнего ориентирования снимка являются координаты Xs, Ys, Zs центра проекции S в системе координат объекта OXYZ и углы поворота ω, α, κ системы координат снимка oxyz относительно системы координат объекта OXYZ. Угол поворота ω называется поперечным (тангаж для самолета) и определяет вращение вокруг оси ox, угол поворота α называется продольным (крен) и определяет вращение вокруг оси oy, угол κ называется разворотом (снос) и определяет вращение вокруг оси oz.
Координаты точек объекта и их изображений на снимке связаны векторным уравнением, которое называется уравнением коллинеарности:
= + .
или в координатной форме:
где: X, Y, Z — координаты точки М в системе координат объекта;
XS, YS, ZS — координаты центра проекции S в системе координат объекта;
X’, Y’, Z’ — координаты вектора r в системе координат объекта, которые определяются по формуле:
где А — матрица преобразования координат (матрица направляющих косинусов), элементы сij которой определяются по значениям угловых элементов внешнего ориентирования снимка w, a, κ.
С учетом последнего выражения уравнение коллинеарности примет вид:
Если известны элементы внешнего ориентирования снимка Xs, Ys, Zs, ω, α, κ и высоты точек Z, то по формуле (4) можно определить координаты точек объекта.
Элементы внешнего ориентирования могут быть определены в результате фотограмметрической обработки снимков по опорным точкам или получены во время съёмки по данным обработки бортовых спутниковых кинематических измерений и измерений инерциальной системы.
- Элементы внешнего ориентирования пары снимков
Положение пары снимков в координатной системе OXYZ (рис. 13) объекта определяется 12 элементами внешнего ориентирования: шестью элементами внешнего ориентирования левого снимка и шестью элементами внешнего ориентирования правого снимка:
XSЛ, YSЛ, ZSЛ, wЛ, aЛ, kЛ, ХSП, YSП, ZSП, wП, aП, kП.
Координаты правого центра проекции можно вычислить через координаты левого центра проекции и проекции базиса фотографирования В на координатные оси: ХSп = XSл + BX, YSп = YSл + BY, ZSп = ZSл + BZ. Вычисление базисных составляющих BX, BY, BZ производится по формулам:
На основе (6) значения углов n и t можно вычислить по формулам
n =arcsin = arctg , t = arctg .
С учётом элементов ориентирования базиса фотографирования 12 элементов внешнего ориентирования (5) пары снимков в координатной системе ОХУZ можно записать в виде:
XSЛ, YSЛ, ZSЛ, wЛ, aЛ, kЛ, B, n, t, wП, aП, kП.
В системе координат SЛXУZ, параллельной координатной системе ОХУZ, начало отсчёта координат расположено в центре проекции левого снимка, поэтому XSл = YSл = ZSл = 0. В результате для пары снимков в координатной системе SЛXУZ из 12 элементов внешнего ориентирования (7) не равными нулю будут девять:
wЛ, aЛ, kЛ, B, n, t, wП, aП, kП.
- Системы координат модели объекта.
Элементы взаимного ориентирования пары снимков
При построении модели объекта используется система координат SЛXМYМZМ, у которой начало отсчёта координат расположено в центре проекции левого снимка, т.е. XМSл = YМSл = ZМSл = 0. Следовательно, в системе координат модели объекта из 12 элементов ориентирования пары снимков не равными нулю будут девять аналогично (8). Чтобы отличать их от элементов внешнего ориентирования этих снимков в системе координат объекта, введём индекс «штрих», а базис обозначим буквой b, т.к. его длина задаётся в масштабе модели, и он называется базисом проектирования.
wЛ‘, aЛ‘, kЛ‘, b, n’, t’, wП‘, aП‘, kП‘.
Для облегчения построения модели, расположение пары снимков в системе координат модели задают так, чтобы часть элементов ориентирования (9) стали также равными нулю. С этой целью используют две системы координат модели: базисную и левого снимка.
- Базисная система координат SЛXМYМZМ (рис. 14, а) названа так потому, что ось ХМ совмещена с базисом проектирования SЛSП, а ось ZМ расположена в главной базисной плоскости VЛ левого снимка, проведённой через базис b и главный оптический луч SЛoЛ. Ось YМ дополняет систему до правой.
В базисной системе координат из элементов ориентирования (9) пары снимков равны нулю три угловых элемента ориентирования: wЛ‘ = n’ = t’ = 0. В результате в базисной системе координат для пары снимков число элементов ориентирования, не равных нулю, сокращается до шести:
aЛ‘, kЛ‘, b, wП‘, aП‘, kП‘.
- Система координат левого снимка SЛXМYМZМ (рис. 14, б) названа так, потому что она параллельна системе координат SЛxЛyЛzЛ левого снимка. У неё ось ZM совмещена с осью zЛ, а оси XМ и YМ параллельны осям xЛ и yЛ, соответственно. В системе координат левого снимка равны нулю все шесть элементов ориентирования левого снимка: XМSл = YМSл = ZМSл = wЛ‘ = aЛ‘ = kЛ‘ = 0. Следовательно, в этой системе координат из элементов ориентирования (9) не равными нулю будет также шесть:
b, n’, t’, wП‘, aП‘, kП‘.
Как видно, в обеих системах координат модели объекта элементы ориентирования (10) и (11) пары снимков, не равные нулю, состоят из линейного элемента (базиса проектирования b) и пяти угловых элементов. Угловые элементы называют элементами взаимного ориентирования пары снимков.
- Продольный и поперечный параллаксы
При измерении стереопары кроме координат точек используют разности этих координат на обоих снимках, называемые параллаксами (рис. 15). При стереосъёмке точки объекта изображаются в разных частях левого и правого снимков. Например, на левом снимке точка объекта изобразилась в точке m. В системе координат o’ЛxЛyЛ этого снимка она будет иметь координаты xЛ, yЛ. На правом снимке та же точка объекта изобразилась в точке m’, и в системе координат o’ПxПyП она имеет координаты xП, yП.
По координатам xЛ, yЛ нанесём на правом снимке положение точки m. Смещения точки m’ относительно точки m вдоль координатных осей х и у являются, соответственно, продольным (буква р) и поперечным (буква q) параллаксами. Их величины рассчитывают по формулам: p = xЛ — xП, q = yЛ — yП.
Продольный параллакс р является базисом фотографирования b в масштабе съёмки данной точки. Это видно из формулы
где В — базис фотографирования, Н — высота фотографирования, f — фокусное расстояние фотокамеры, m — знаменатель масштаба съёмки.
Из (12) следует, что продольный параллакс р имеет переменную величину по площади снимка из-за изменений высоты фотографирования Н в зависимости от рельефа местности. Следовательно, измерив на стереопаре снимков продольные параллаксы, можно рассчитать высоты на местности.
Что касается поперечного параллакса q, то он возникает из-за различия в величинах элементов внешнего ориентирования левого и правого снимков.
BX = XSп — XSл не изменяет координат уП по сравнению с координатами уЛ и, следовательно, не вызывает появления поперечного параллакса.
BY = YSп — YSл изменяет ординаты на правом снимке на величину .
BZ = ZSп — ZSл изменяет масштаб правого снимка относительно левого.
Разность углов wЛ и wП, aЛ и aП, kЛ и kП вызывают изменения координат на снимках относительно друг друга.
- Точность определения координат точек объекта
по измерениям стереопары
Чтобы получить формулы, по которым можно рассчитать точность определения координат точек сфотографированного объекта по измерениям стереопары, воспользуемся формулами идеального случая аэросъёмки. Идеальный случай аэросъёмки подразумевает следующие условия.
- Базис фотографирования B параллелен координатной оси Х, поэтому его проекции на координатные оси BX = B, BY = BZ = 0.
- Снимки расположены горизонтально, т.е. углы wЛ = aЛ = kЛ = wП = aП = kП = 0, и системы координат левого SЛx0Лy0Лz0Л и правого SПx0Пy0Пz0П снимков параллельны системе координат ОХУZ объекта.
Формулы получим в системе координат SЛXYZ, т.е. XSл = YSл = ZSл = 0. В формулах общего случая аэросъёмки приравняем нулю указанные выше элементы внешнего ориентирования и получим следующие формулы.
X = , Y = , Z = .
Видно, что точность вычисления плановых координат Х и Y зависит от точности измерения на стереопаре координат x, y и продольного параллакса p, а точность вычисления высоты Z — только от точности измерения продольного параллакса p. С учётом этого, продифференцировав формулы (10), получим
dX = , dY = , dZ = .
Перейдем к средним квадратическим погрешностям, учитывая следующие замены: , = р = b и p2 = . В результате получим
где mX, mY, mZ — средние квадратические погрешности вычисления координат точек объекта,
mx, my, mp — средние квадратические погрешности измерения координат и продольного параллакса на стереопаре,
b — базис фотографирования в масштабе снимков.
Если принять, что погрешности измерений mx, my, mp примерно равны, то
Вторые члены подкоренных выражений будут иметь максимальные величины при максимальных значениях координат х и у, т.е. погрешности mX и mY будут иметь максимальные величины на точках, расположенных в углах стереопары. В этом случае х = у = b, и . В результате формулы расчёта точности определения координат точек сфотографированного объекта по измерениям стереопары принимают вид:
где mXY = и mxy = — средние квадратические погрешности планового положения точек на объекте и на стереопаре.
Если предположить, что:
1) снимки получены в идеальной центральной проекции,
2) построение модели объекта выполнено без погрешностей,
3) измерительный прибор не вносил своих погрешностей,
то mx, my и mp будут погрешностями наведения измерительной марки на точки стереопары, значения которых mx » my » mp » 5 мкм. Однако из-за влияния различных источников, действия которых проявляются при съёмке и при обработке снимков, реальная точность измерения снимков колеблется от 7 до 20 мкм.
Так, аналоговые снимки, зафиксированные в фотокамере на фотоплёнку, проходят сначала фотохимическую обработку, а затем сканируются на специальном фотограмметрическом сканере. В ходе выполнения этих процессов исходная геометрия построения снимков подвергается искажению. Основными источниками искажения является деформация фотоматериала, вызванная «мокрым» фотохимическим процессом и старением фотоплёнки, если она перед сканированием хранилась какое-то время, а также инструментальные погрешности в работе сканера (см. раздел 11, с. 29).
Общая суммарная систематическая деформация может быть устранена по измерениям калиброванных координатных меток, которые впечатываются с прикладной рамки фотокамеры на каждый снимок, или сетки крестов, которые впечатываются с прижимного стекла, расположенного в плоскости прикладной рамки фотокамеры. Остаточные локальные деформации по полю снимка таким путём не устраняются, и они снижают точность фотограмметрических измерений.
Геометрия построения цифрового снимка, полученного в цифровой фотокамере, зависит от качества изготовления расположенной в фотокамере светочувствительной матрицы, в частности, её плоскостности и точности установки в фотокамере. В настоящее время точности изготовления матриц и их установки в фотокамерах достаточно высоки и отвечают требованиям точности фотограмметрических измерений. Размер пикселей матриц цифровых фотокамер, используемых в аэросъёмке, находится в пределах от 6 до 12 мкм.
На точность измерения снимков также влияет качество фотографического изображения. Из источников, ухудшающих качество, можно выделить два основных: неоптимальная экспозиция и смаз изображения из-за вибрации фотокамеры и её поступательного движения относительно объекта. Современные камеры, как правило, снабжены автоматическими устройствами выбора оптимальной экспозиции и компенсации смаза изображения. Однако остаточное влияние этих источников ухудшает точность измерения цифрового изображения. Практический опыт показывает, что средние погрешности измерения координат цифрового изображения должны быть не хуже 0,5 пикселя. В противном случае нужно искать причину нарушения геометрии построения цифрового изображения.
- Технологическая схема
стереофотограмметрической съёмки
В настоящее время основным видом сбора цифровой и графической информации об объекте по его изображениям является стереофотограмметрическая съёмка (в топографии она называется стереофототопографической), технологическая схема которой приведена на рис. 16. На технологической схеме показаны укрупнённые процессы (в утолщённых рамках) и вид продукции (в тонких рамках), передаваемой (показаны стрелками) из одного процесса в другой. Далее даются краткие пояснения каждого процесса.
Точки государственной геодезической сети (ГГС) — пункты триангуляции, нивелирования, полигонометрии — используют в качестве опорных точек при создании съёмочного обоснования и фотограмметрической обработке снимков. При съёмке инженерных, архитектурных и других сооружений в качестве опорных точек используют замаркированные точки, координаты которых определяют геодезическими измерениями в системе координат данного сооружения или ГГС.
Снимки, полученные при аэро-, наземной или космической фотосъёмке, используют при полевом дешифрировании, создании съёмочного обоснования и при фотограмметрической обработке снимков. Если во время проведения съёмки использовалась спутниковая навигационная система, то полученные координаты центров проекции снимков используют при построении сетей фототриангуляции в качестве дополнительных опорных точек.
Т.к. пункты ГГС располагаются довольно разреженно, их дополняют точками съёмочного обоснования (плановыми и высотными опознаками) для обеспечения опорными точками последующего построения сетей фототриангуляции. Проектирование количества и расположения опознаков производят с учётом масштаба создаваемой карты, установленной высоты сечения рельефа и точности фотограмметрического сгущения.
Если технология съёмочного обоснования предполагает маркировку опознаков на местности, то этот процесс выполняют до аэросъёмки. Точность наведения измерительной марки на точки снимка, маркированные на местности или объекте, выше, чем на точки, маркированные непосредственно на снимках, или на контурные точки снимков. При этом наилучший эффект будет достигнут, если точки местности (объекта) будут покрашены краской, дающей максимальное отражение света в той зоне спектра, для которой аберрации у объектива фотокамеры сведены до минимума.
Дальнейшие процессы связаны с фотограмметрической обработкой снимков, которая начинается с построения сети фототриангуляции, если имеются две или более последовательных стереопары, а также два маршрута и больше. Если же имеется только одна стереопара, то при её обработке практически выполняются почти те же процессы, что при построении сети фототриангуляции. Более существенное отличие в фотограмметрической обработке одиночного снимка. С учётом этого в следующих параграфах даются последовательно пояснения о фототриангуляции, об обработке одиночной стереопары и об обработке одиночного снимка.
По окончании фотограмметрической обработки выполняется редактирование и оформление цифрового оригинала карты, после чего он отправляется в банк цифровой топографической информации (БЦТИ). Цифровая карта хранится на машинном носителе в БЦТИ в масштабе 1:1, т.е. в натуральных размерах, в основном, в метрах. Её точность должна соответствовать точности наиболее крупномасштабной карты в графическом виде, которую можно создать по данным снимкам. Пользователь картой приобретает её в БЦТИ в цифровой форме и собственными средствами делает тираж в нужном количестве или заказывает этот тираж.
- фототриангуляция
Фототриангуляцию используют для определения элементов внешнего ориентирования (ЭВО) каждого снимка, которые были в момент съёмки. Эти элементы (см. разделы 14 и 15) задают ориентацию систем координат снимков в системе координат местности (объекта) и тем самым обеспечивают выполнение последующих процессов обработки снимков. Если во время съёмки используется спутниковая навигационная система (ГЛОНАСС или GPS), то определённые с помощью неё ЭВО снимков используют при построении сети фототриангуляции. Если точность определения ЭВО удовлетворяет точности построения сети фототриангуляции, то их используют в качестве опорной информации. Если же нет, то их используют в качестве исходных, приближённых значений. В этом случае, чтобы координаты точек сети фототриангуляции были получены в системе координат объекта (местности), необходимо на объекте в его системе координат измерить координаты точек, которые в фототриангуляционной сети будут выполнять роль опорных и контрольных точек.
В зависимости от числа аэросъёмочных маршрутов, используемых при построении сетей фототриангуляции, она подразделяется на маршрутную (одномаршрутную) и блочную (многомаршрутную). Блочная фототриангуляция строится по двум и более маршрутам. Она имеет преимущество перед маршрутной сетью, т.к. для её внешнего ориентирования общее число опорных точек и их густота расположения будут меньше, чем при построении на ту же площадь маршрутных сетей.
Для построения сетей фототриангуляции стандартное продольное перекрытие снимков должно составлять в среднем 60%, а поперечное — в среднем 30-40%. В отдельных случаях для повышения точности построения блочных сетей съёмку выполняют при одинаковых (в среднем 60%) продольном и поперечном перекрытиях.
Для построения сетей фототриангуляции используют три способа: независимых моделей, независимых маршрутов и связок. Способ независимых моделей подразумевает следующий порядок действий. По отдельным стереопарам строят модели, независимые друг от друга. Затем их соединяют в общую модель (блок), используя межмодельные связующие точки, расположенные в пределах продольных межмодельных перекрытиях, и межмаршрутные связующие точки, расположенные в пределах поперечных межмаршрутных перекрытиях. В результате получают свободную сеть, т.е. сеть в масштабе, близком к заданному, и с примерной ориентировкой в системе координат объекта. Затем выполняют внешнее ориентирование и уравнивание свободной сети по опорным точкам. Способ независимых маршрутов заключается в том, что свободные сети строят в пределах маршрутов, а затем по межмаршрутным связующим точкам соединяют их в блок, который внешне ориентируют и уравнивают по опорным точкам. Способ связок позволяет построить, ориентировать и уравнять сеть одновременно по всем снимкам без построения моделей.
Для примера рассмотрим технологическую схему (рис. 17), составленную из укрупнённых процессов, входящих в построения сетей фототриангуляции способом независимых моделей или способом связок.
Подготовительные работы включают получение и изучение исходных материалов, а также подготовку прибора к работе.
Исходными материалами являются:
1) материалы аэро-, космической или наземной съёмки, в качестве которых могут быть чёрно-белые, цветные или спектрозональные снимки. Для ЦФС они должны быть записаны в цифровой форме на электронном носителе с помощью фотограмметрического сканера, имеющего стабильный элемент геометрического разрешения порядка 8-15 мкм и инструментальную погрешность не более 3-5 мкм. Сканирование снимков выполняют в том порядке, в каком они будут обрабатываться, не допуская их разворота относительно системы координат сканера и соблюдая в пределах каждого маршрута их ориентировку относительно местности;
2) паспортные данные фотокамеры: фокусное расстояние, расстояния между координатными метками или координаты этих меток, данные о дисторсии объектива фотокамеры и другие данные при использовании не кадровых фотокамер;
3) значение высоты фотографирования над средней плоскостью участка местности или значение среднего масштаба снимков;
4) элементы внешнего ориентирования снимков, если они были определены во время съёмки (данные ГЛОНАСС или GPS);
5) материалы планово-высотной подготовки снимков. К ним относятся: каталог координат опорных точек, контактные отпечатки снимков с маркированными опорными и контрольными точками и описания расположения этих точек;
6) материалы полевого и камерального дешифрирования;
7) редакционные указания и ведомственные материалы картографического назначения;
8) уточнённые фотосхемы или снимки, увеличенные до масштаба составляемой карты с подписанными географическими названиями и характеристиками топографических объектов.
Вместе с исходными материалами используют инструкции, наставления, руководства, условные знаки и другие документы, касающиеся технологии проведения работ.
Перед началом работы на ЦФС оператор задаёт рабочую директорию, а также директорию для хранения архивных копий файлов, содержащих результаты обработки. Оператор вводит в память компьютера исходные данные, записывая их в соответствующие файлы. Кроме того, он записывает допустимую величину остаточных поперечных параллаксов, допустимые расхождения координат на опорных и контрольных точках.
- фотограмметрическая обработка
одиночной стереопары
На рис. 18 приведена технологическая схема из укрупнённых процессов фотограмметрической обработки одиночной стереопары.
Порядок выполнения внутреннего ориентирования в общих чертах следующий. Вначале оператор измеряет на снимке координаты координатных меток, а затем включает процесс вычислений, в ходе выполнения которого определяются элементы ориентирования системы координат снимка относительно системы координат сканера. Используя их величины, измеряемые координаты точек снимка пересчитываются в систему координат снимка с началом в его центре проекции. При этом в координаты вводятся поправки, учитывающие деформацию снимка и дисторсию объектива съёмочной камеры. По окончании вычислений на экране дисплея высвечиваются полученные результаты. Внутреннее ориентирование считается законченным при расхождениях измеренных величин от их паспортных значений в пределах размера пикселя, с которым был получен цифровой снимок.
Построение геометрической модели объекта (взаимное ориентирование снимков). Условие построения этой модели заключается в том, что остаточные поперечные параллаксы (двоение марки поперёк глазного базиса) в пределах стереопары не должны превышать допустимой величины. В ходе выполнения этого процесса измеряют координаты шести, двенадцати (две рядом) или восемнадцати (три рядом) точек, расположенных в углах рабочей площади стереопары и районах главных точек снимков (см. раздел 9). Измерения может выполнять с использованием коррелятора или стереоизмерений, а также включив автоматический режим. По завершении измерений точек выполняется процесс вычисления, и на экране дисплея высвечиваются значения элементов взаимного ориентирования снимков, величины остаточных поперечных параллаксов на каждой точке. Взаимное ориентирование считается законченным, если остаточные поперечные параллаксы не превышают 15 мкм при средней величине порядка 7 мкм.
Закончив взаимное ориентирование, выполняют внешнее ориентирование модели. В ходе выполнения этого процесса модель приводят к нужному масштабу и ориентируют в системе координат объекта. Для этого необходимо иметь минимум три опорные точки с известными в системе координат объекта координатами. Для контроля берут четвёртую точку, которую можно использовать как контрольную. Точки должны располагаться в углах рабочей площади стереопары (см. раздел 9). Наличие большего числа опорных точек позволяет повысить точность внешнего ориентирования модели и выполнить вычисления с использованием метода наименьших квадратов. По окончании измерения опорных и контрольных точек выполняются вычисления. После их завершении на экране дисплея высвечиваются элементы внешнего ориентирования снимков, величины остаточных расхождений координат на опорных и контрольных точках, характеризующие точность ориентирования модели в системе координат объекта.
Внешнее ориентирование модели считается законченным, когда:
— на опорных точках остаточные расхождения плановых координат станут меньше 0,2 мм в масштабе карты, а высот — меньше 0,2 высоты сечения рельефа;
— на контрольных точках остаточные расхождения плановых координат станут меньше 0,3 мм в масштабе карты, а высот — меньше 0,3 высоты сечения рельефа.
После завершения построения и ориентирования модели все элементы ориентирования записываются в памяти компьютера, и оператор может приступать к сбору цифровой информации об объекте.
- фотограмметрическая обработка
одиночного снимка
На рис. 19 приведена технологическая схема фотограмметрической обработки одиночного снимка, в результате которой можно создать фотоплан и выполнить по нему съёмку (векторизацию) контуров. Такой вариант возможен для открытой равнинно-всхолмленной местности при наличии населённых пунктов с малоэтажной застройкой.
Подготовительные работы выполняются так же, как и для двух и более снимков. Внутреннее ориентирование снимка также выполняется аналогично, как и при большем количестве снимков. При выполнении внешнего ориентирования на снимке измеряют только плановые координаты и вычисления ориентации снимка в пространстве выполняют по формулам для одиночного снимка.
Для ортофототрансформирования используется программа, которая используется и при большем количестве снимке. Отличие состоит в том, что линии разреза не намечают, а указывают площадь, в пределах которой нужно выполнить ортофототрансформирование. Обычно это рабочая площадь снимка. Что касается матрицы высот, то она создаётся отдельно, т.к. по одному снимку нельзя измерить высоты на местности. Для её построения можно использовать карту меньшего масштаба, чем предполагаемый масштаб трансформированного изображения. С карты сканируют горизонтали, и по ним строят матрицу высот.
Получив трансформированное изображение, оператор приступает к съёмке контуров (их векторизации). Особенность состоит в том, что контуры объектов должны совпадать с ортогональной проекцией, как это требуется при создании планов (карт). Прежде всего, это касается строений. Их очерчивают по крышам, а затем смещают на положение видимого основания здания.
- Цифровая модель рельефа местности.
матрица высот
Цифровая модель рельефа (ЦМР) — это неотъемлемая часть цифровой карты или цифровой модели местности (ЦММ), где объектом «моделирования» является рельеф местности. Исходной информацией для создания такой модели являются съёмочные пикетные точки с геодезическими координатами X, Y, Z и структурные линии рельефа, вершины которых имеют координаты X, Y, Z. Сама по себе эта исходная информация является моделью рельефа нерегулярной структуры. В настоящее время известны следующие источники исходной информации о рельефе:
— наземная топографическая съёмка,
— фотограмметрический метод обработки стереопар аэрокосмической съёмки,
— данные воздушного лазерного сканирования,
— радиолокационная интерферометрия.
Качество полученной одним из перечисленных способов информации о рельефе зависит от соответствия плотности пикетов изменению характера рельефа, наличию структурных линий в пересеченной местности. Структурные линии, как исходные данные, могут присутствовать только при наземных и фотограмметрических методах съёмки. Отсутствие структурных линий в данных лазерного сканирования компенсируется избыточной плотностью точек на поверхности земли.
Исходная ЦМР может быть преобразована в пространственную модель поверхности в виде треугольников, вершинами которых являются съёмочные пикетные точки. Правила построения такой триангуляции определены в теоремах российского математика Б.Н. Делоне. Основные из них гласят:
— внутри окружности, описанной вокруг любого из треугольников не должно содержаться съёмочных пикетных точек;
— ребра треугольников не должны пересекать структурных линий рельефа.
Триангуляция Делоне (в английской терминологии TIN — Triangular Irregular Network- треугольная нерегулярная сеть), т.е. нерегулярная модель рельефа. Регулярной моделью рельефа является матрица высот или DEM (Digital Elevation Model- цифровая модель высот).
Матрица высот (МВ) представляет собой набор высотных пикетов регулярной структуры, т.е. на поверхности земли высоты заданы с определенным постоянным шагом ΔX и ΔY. Преимущества регулярной формы представления модели рельефа в удобстве хранения и манипулирования, а недостаток в избытке узлов на спокойном рельефе и недостатке в пересеченной местности. Поэтому иные прикладные программы имеют возможность создавать и манипулировать с матрицей высот переменной плотности.
Преимущество нерегулярной сетки TIN в более рациональном описании поверхности в зависимости от пересечённости местности, а недостаток в сложности хранения и манипуляции. Программы, предназначенные для создания и манипулирования ЦМР, как правило, предусматривают преобразование из нерегулярной структуры в регулярную.
Другой формой представления ЦМР являются горизонтали, которые могут быть созданы по стереопарам непосредственно в ЦФС путём стереоскопической трассировки линии на заданной высоте. Горизонтали также могут быть построены по нерегулярной (TIN) или регулярной (МВ) модели рельефа. Преимущество горизонталей как формы представления рельефа в том, что это более привычная и наглядная форма представления рельефа. Недостаток в сложности численных алгоритмов решения картометрических задач.
Можно выделить три основные задачи построения ЦМР на ЦФС:
— построение горизонталей для отображения на топографических картах,
— построение матрицы высот для ортофототрансформирования снимков и создания фотоплана,
— построение модели рельефа для решения прикладных задач.
Точность и подробность ЦМР во всех случаях регламентируется соответствующими нормативными документами [3].
В зависимости от требований к создаваемой ЦМР, особенностей материала и функциональных возможностей ЦФС можно выделить следующие способы построения ЦМР:
— трассировка горизонталей по стереоскопическим моделям,
— набор пикетов и рисовка структурных линий рельефа по стереоскопическим моделям,
— набор пикетов в автоматическом режиме с заданными оператором параметрами с последующей редакцией.
Возможны комбинации перечисленных способов.
- фототрансформирование снимков
Фототрансформирование снимков это преобразование изображения, полученного в одной проекции, в изображение в другой проекции. При выполнении такого преобразования нужно учитывать геометрию построения изображения в съёмочной системе. Кроме того, нужно учитывать:
— является ли снимок горизонтальным или наклонным,
— был ли сфотографированный объект плоским или рельефным,
— каковы особенности проекции, в которой должно быть получено трансформированное изображение.
Кадровый снимок является изображением точек земной поверхности на плоскости, зафиксированных в один момент времени в перспективной центральной проекции. Однако снимок имеет угол наклона относительно отвесной линии к поверхности референц-эллипсоида, что приводит к смещениям точек на снимке по сравнению с их положениями на горизонтальном снимке. Правда, эти смещения подчиняются определённому закону и, если известна величина угла наклона снимка, они легко устраняются при использовании формул (4) перехода из системы координат снимка в систему координат местности (объекта).
Однако использование этих формул затруднено влиянием рельефа, т.к. в формулы входит высота Z точки местности. Рассмотрим влияние рельефа местности (объекта) на построение изображения на снимке и на создание топографической карты (плана).
По законам построения изображения в центральной перспективной проекции точка М местности (рис. 20) изобразится на снимке Р в точке m, отстоящей от точки надира n на расстоянии r. При создании топографических карт точки местности должны быть спроектированы отвесными линиями на поверхность референц-эллипсоида. На снимках, по которым создаются крупномасштабные топографические карты, изображаются сравнительно небольшие по площади участки местности, в пределах которых поверхность референц-эллипсоида можно принять за плоскость. Таким образом, точка местности М будет проектироваться на горизонтальную плоскость Е в точку МО.
Если изображение, полученное на снимке Р, спроектировать по законам центральной проекции на плоскость Е, то точка m спроектируется в точку М’, а не в точку MО. Чтобы точка m спроектировалась в точку МО, необходимо сместить её на снимке в точку mО. Величину смещения — отрезок mmО = drh — называют смещением точки, вызванным рельефом местности. Таким образом, понятие смещения точек на снимке, вызванные рельефом местности, возникает из-за разных проекций на снимке и на карте (плане).
Из подобия треугольников SNMО и SnmО, а также SN’M и Snm запишем: . После преобразований получим формулу смещений точек на горизонтальном снимке, вызванных рельефом местности.
drh = .
Из анализа формулы (15) можно сделать вывод, что drh = 0 при:
1) r = 0, т.е. в точке надира n смещение, вызванное рельефом местности, отсутствует. Это объясняется тем, что точка надира является точкой пересечения снимка отвесной линией, т.е. она единственная точка снимка, которая будет соответствовать ортогональной проекции;
2) h = 0, т.е. изображение плоской горизонтальной местности преобразуется из центральной проекции в ортогональную проекцию без погрешностей.
Увеличение высоты фотографирования Н приводит к уменьшению величин смещений точек на снимке. Т.к. Н = f m, можно сделать вывод, что на длиннофокусных снимках смещения точек будут меньше, чем на короткофокусных. В то же время увеличение рельефа и радиус-вектора точек приводит к увеличению их смещений, и наибольшие их величины будут на краю снимка. Следовательно, если необходимо получить снимки с минимальными смещениями, вызванными рельефом местности, то аэросъёмку следует выполнить с максимально возможной высоты и длиннофокусной фотокамерой с небольшим форматом кадра.
Задача фототрансформирования снимков решается, если заранее на участок местности, изображённой на снимках построить матрицу высот (МВ). В результате трансформированное изображение получается в ортогональной проекции, поэтому такое фототрансформирование снимков называют ортофототрансформированием. Т.к. ортофототрансформирование выполняется по цифровым снимкам и с использование МВ, его ещё называют цифровым ортофототрансформированием снимков.
- Принцип цифрового ортофототрансформирования
снимков
Цифровое ортофототрансформирование снимков является одной из основных операций обработки цифровых снимков на ЦФС. Исходное цифровое изображение состоит из элементарных участков-пикселей, которые трансформируют каждый в отдельности с использованием значений элементов ориентирования снимка и данных матрицы высот.
На рис. 21 приведена укрупнённая технологическая схема цифрового ортофототрансформирования снимков.
Для выполнения цифрового ортофототрансформирования снимка необходимо ввести в компьютер: 1) снимок в цифровой форме, 2) данные фотокамеры, 3) каталог опорных точек или элементы внешнего ориентирования снимка, 4) матрицу высот.
Если после фототриангуляции для трансформируемых снимков были получены элементы ориентирования, то сразу приступают к цифровому ортофототрансформированию снимков. Если же элементы ориентирования снимков не известны, то сначала выполняют внутреннее и внешнее ориентирования снимков, а затем переходят к их цифровому ортофототрансформированию.
Далее поясняется смысл основных процессов при формировании трансформированного изображения в цифровой форме (рис. 22).
- Вначале создают пустую матрицу трансформированного изображения.
1.1. На снимке задают границы участка изображения, подлежащего трансформированию. Обычно этот участок немного больше рабочей площади снимка, чтобы существовало перекрытие с трансформированными участками соседних снимков. Граница задаётся в виде прямоугольника.
1.2. Компьютер, используя координаты x и y углов участка в системе координат снимка, рассчитывает координаты X и Y этих углов на местности по формулам (4). Т.к. высоты Z на местности не известны, при расчёте используется средняя высота, определённая по высотам опорных точек.
1.3. Задаётся размер D пикселя матрицы трансформированного изображения на местности. Чтобы трансформированное изображение сохранило точность снимка, размер пикселя рассчитывают по формуле D = DС m, где DС — размер пикселя на снимке, а m — знаменатель масштаба снимка. Если трансформированное изображение будет использоваться для изготовления фотоплана в виде твёрдой копии масштаба 1:М, то размер пикселя рассчитывают по формуле D = 0,07 M/1000 (м), где 0,07 мм — разрешение графического изображения.
1.4. Используя размер D пикселя на местности и координаты X и Y углов участка, компьютер создаёт пустую матрицу трансформированного изображения, представляющую собой сетку квадратов. С этой целью координаты левого верхнего угла матрицы компьютер изменяет так, чтобы они стали кратны размеру D пикселя, и прибавляет к ним последовательно заданный размер пикселя, тем самым строя построчно слева направо и сверху вниз пустую матрицу трансформированного изображения. В результате каждый пиксель матрицы получает координаты XI и YI на местности.
- 2. Далее матрица заполняется изображением поверхности местности.
2.1. По координатам XI, YI каждого пикселя матрицы трансформированного изображения компьютер находит на МВ соответствующую ему точку и определяет её высоту ZI. МВ (рис. 22) представляет собой многогранную поверхность, состоящую из четырёхугольников, которые в ортогональной проекции на плоскость представляют собой квадраты. Это позволяет путём билинейного интерполирования между ближайшими точками МВ с известными высотами Z1, Z2, Z3, Z4 вычислить высоту ZI. По высотам Z1 и Z2 компьютер рассчитывает высоту ZK, а по высотам Z3 и Z4 — высоту ZN, используя формулы
ZK = , ZN =
Используя эти высоты, компьютер рассчитывает высоту ZI по формуле
Расчёт расстояний DXI, DYI и D выполняется по разностям плановых координат соответствующих точек, используя формулу D = .
2.2. По координатам ХI, YI, ZI, компьютер вычисляет координаты xi и yi в системе координат снимка по формулам
2.3. По вычисленным координатам xi, yi компьютер находит на снимке пиксель, соответствующий пикселю матрицы трансформированного изображения, и определяет числовое значение оптической плотности (ОП). Если трансформируется цветное изображение, то дополнительно определяется показатель цветности.
2.4. Полученное значение ОП (и показатель цветности) придают пикселю в матрице трансформированного изображения.
2.5. Перемещаясь последовательно по матрице вдоль строк от пикселя к пикселю, компьютер выполняет операции, указанные в пунктах 2.1-2.4, и, таким образом, формирует трансформированное изображение в цифровой форме и выводит его на экран дисплея.
При подключении к выходу компьютера фотопечатающего устройства или принтера с высоким разрешением трансформированное изображение можно распечатать в виде фото- или растрового изображения.
- Цифровое ортофототрансформирование снимков
равнинной местности
При фототрансформировании снимков матрицу высот (МВ) можно не использовать, если в пределах рабочей площади снимка смещения точек, вызванные рельефом местности, не превышают допустимой величины. Чтобы рассчитать допустимый перепад высот, вызывающий такие смещения, запишем формулу (15) в следующем виде:
где r — радиус-вектор угла рабочей площади снимка (см. раздел 9).
Из трансформированных снимков монтируют фотоплан, являющийся основой контурной части карты, на которой смещения точек, вызванные рельефом местности, не должны превышать drhдоп = 0,3 мм (рис. 23).
Фотоплан создаётся в более крупном масштабе, чем снимок, поэтому смещения точек на снимке в пределах рабочей площади не должны превышать
где кт = m/M- коэффициент фототрансформирования, М — знаменатель масштаба фотоплана, m — знаменатель масштаба снимка. После подстановки формулы (17) в (16) получим допустимое предельное превышение на местности.
На местности превышения рассчи-тываются от средней плоскости Е. Поэтому допустимый перепад высот Q (называется высотой зоны) будет равен удвоенному предельному превышению, и его можно рассчитать по формуле
Если в пределах рабочей площади снимка Q ≥ AMAX — AMIN, где AMAX — максимальная и AMIN — минимальная высоты, то в формулы (4) для всех точек снимка вместо их высот Z можно подставить среднюю высоту
ZСР = и при фототрансформировании снимка матрицу высот не использовать. Особенность состоит в том, что трансформированное изображение будет получено в центральной проекции, а не в ортогональной. Однако отклонения точек этого изображения от положений, соответствующих условию ортогонального проектирования, не будут превышать 0,3 мм.
- монтирование Фотоплана
Фотоплан — план местности, составленный из трансформированных снимков, который по точности планового положения контуров соответствует топографической карте.
Фотоплан может использоваться как самостоятельный вид картографического документа, так и в качестве основы для сбора векторной информации о контурной части создаваемой цифровой карты. Фотоплан составляют из рабочих площадей трансформированных снимков. Чтобы соединить соседние снимки, нужно провести на них линию разреза по середине зон продольных и поперечных перекрытий. При проведении линии нужно соблюдать следующие требования:
— линейные объекты нужно разрезать под прямым углом;
— нельзя проводить разрез вдоль линии, разделяющей объекты разного тона (темные и светлые);
— нельзя проводить разрез через объекты, имеющие хозяйственное назначение или служащие ориентирами;
— населённые пункты нужно обходить. Если этого сделать нельзя, то разрез лучше провести по широкой улице или огородам.
Принцип соединения цифровых снимков можно пояснить на примере соединения четырёх трансформированных снимков (рис. 24): два Р1-1 и Р1-2 в верхнем маршруте и два Р2-1 и Р2-2 в нижнем маршруте. Для обеспечения стыковки строк в соседних снимках снимки должны иметь одинаковый размер пикселей и кратные этому размеру начала систем координат. Посредине продольного и поперечного перекрытий снимков проводят полилинии, которые будут линиями их разреза. Пиксели, через которые проходят линии разреза, будут граничными пикселями. С учётом размеров изображений компьютер формирует матрицу фотоплана, которая должна по площади накрывать четыре снимка. Там где нет изображения, пиксели матрицы останутся пустыми (белые квадраты). Заполнение строк компьютер выполняет слева направо и сверху вниз. Каждая строка матрицы заполняется вначале соответствующей строкой левого и верхнего снимков, включая граничные пиксели. После граничных пикселей строка заполняется соответствующей строкой правого и нижнего снимков. В результате компьютер сформирует фотоплан.
Оценку точности смонтированного фотоплана производят 1) по точкам сети фототриангуляции, 2) вдоль линий разреза соседних снимков, 3) вдоль рамок, общих с соседними фотопланами или картами.
- 1. Средние расхождения плановых координат на точках сети фототриангуляции не долж-ны превышать 0,5 мм для равнинных и всхолмленных районов и 0,7 мм для горных районов.
- 2. Средняя величина не совмещения одинаковых контуров на линиях разреза соседних снимков не должна превышать 0,7 мм для равнинных и всхолмленных районов и 1,0 мм для горных районов.
- 3. Несовмещения одинаковых контуров на рамке фотоплана при сводке с соседним фотопланом (картой) не должны превышать 1,0 мм для равнинных и всхолмленных районов и 1,5 мм для горных районов.
- Съёмка рельефа и контуров
Съёмку рельефа выполняют только в стереоскопическом режиме. Съёмку контуров выполняют в стереоскопическом режиме по стереопарам или по фотоплану. Стереосъёмку контуров выполняют при создании топографических карт на всхолмленные, горные и высокогорные районы, а также на территории с многоэтажной застройкой. Съёмку контуров по ортофотоплану используют при создании топографических карт на равнинные и всхолмленные районы, незастроенные территории или с малоэтажной застройкой.
Стереосъёмку рельефа и контуров производят в пределах рабочих площадей стереопар. На их границах производят сводку контуров и горизонталей. Нестыковка контуров не должна быть больше 0,6 мм в масштабе карты, а одноимённых горизонталей — не больше одной трети высоты сечения рельефа. При величине заложения горизонталей менее 2 мм, нестыковка одноимённых горизонталей не должна быть больше 0,7 мм в масштабе карты.
Съёмка рельефа
Съёмку рельефа выполняют либо с использованием ЦМР, по которой в автоматическом режиме строят горизонтали, либо их проводит оператор путём трассирования. Трассирование горизонталей вручную целесообразно применять для равнинной, открытой, мало пересечённой местности. При трассировании горизонталей на участках, покрытых лесом или высокой растительностью, высоту марки над поверхностью модели следует увеличить на их высоту. На плоских участках местности бывает трудно определить направление ската и куда нужно вести марку. В этом случае набирают пикеты и путём интерполирования между ними определяют положения горизонталей. Для плоской местности c большим количеством точек разной оптической плотности и цветности можно использовать автоматическое построение ЦМР с последующим редактированием. В рельефной местности оператор вычерчивает структурные линии рельефа (создаёт скелет местности), набирает пикеты на характерных точках рельефа, а затем выполняет автоматическое построение TIN и горизонталей. Завершив съёмку рельефа, точность положения горизонталей проверяют по контрольным точкам, высоты которых были получены либо при построении сети фототриангуляции, либо в ходе полевых геодезических измерений или же набором пикетов другим оператором.
Проведя горизонтали, измеряют характерные точки рельефа, отметки которых должны быть подписаны на карте. При создании карт масштабов 1:2000, 1:1000 и 1:500 измеряют также отметки полотна автомобильных и железных дорог, тротуаров и проезжей части улиц, люков подземных коммуникаций и т.п. согласно содержанию данной топографической карты. Количество таких отметок, например, на карте плоскоравнинных районов должно быть не менее 10-15 на 1 дм2.
Съёмка контуров
Съёмку контуров выполняют по фотоплану или по стереомодели местности. Фотопланы изготавливают на равнинные и всхолмленные районы, а также на сельские населённые пункты с малоэтажной застройкой. Стереорисовку контуров выполняют по снимкам горных и высокогорных районов, а также городских населённых пунктов с многоэтажной застройкой.
Съёмку контуров выполняют по слоям с одновременным дешифрированием и кодированием объектов. В каждом слое зарисовывают однотипные объекты: гидрография, растительность, авто- и железные дороги, сельхозугодия, населённые пункты и т.д. Контуры отбираются согласно требуемой нагрузке топографической карты данного масштаба. Рисовка контуров сопровождается указанием семантической информации, для чего используется классификатор топографических объектов на соответствующий масштабный ряд топографических планов и карт. Объекты, не дешифрируемые по стереомодели, отмечают в задании на полевое дешифрирование и досъёмку.
Если в памяти компьютера имеется библиотека условных знаков, то при наведении марки на отдельные объекты (дерево, труба, церковь и т.п.) можно подать команду на вычерчивание соответствующего условного знака.
Съёмка контуров связана с дешифрированием аэроснимков, которое выполняют преимущественно камерально. Но его дополняют полевым дешифрированием, которое осуществляют с наземных маршрутов или выполняют аэровизуальное дешифрирование с вертолёта или самолёта, пролетая над земной поверхностью на высотах 200-300 м. Сплошное полевое дешифрирование производят в крупных населённых пунктах и на участках, где много не дешифрируемых камерально топографических объектов.
- наземная стереофотограмметрическая съёмка
29.1. Области применения наземной стереофотограмметрической съёмки
Наземная фотосъёмка была разработана вначале для использования в топографии и в связи с этим получила название фототопографическая съёмка. Однако в дальнейшем наземная фотосъёмка получила распространение в других областях деятельности человека (см. раздел 1). С учётом этого её стали называть фотограмметрической съёмкой. Потом в её название добавили слово стерео.
Наземную стереофототопографическую съёмку применяют в предгорной, горной и высокогорной открытой местности для создания топографических карт и специальных планов в масштабах 1:5000 и крупнее, когда экономически невыгодно проводить аэросъёмку и наземные методы съёмки. Её можно также применять в отдалённых, малообжитых всхолмленных районах с коротким полевым сезоном, т.к. её объём полевых работ намного меньше, чем у других видов наземных съёмок. Данный вид съёмки можно использовать для создания планов населённых пунктов, расположенных в долинах, котловинах между возвышенностями, с которых можно произвести стереофотосъёмку.
Наземную стереофототопографическую съёмку можно проводить в сочетании с аэросъёмкой для создания топографических карт в масштабах 1:10000 и мельче. В этом случае по наземным снимкам можно выполнить определения координат контрольных точек, используемых при обработке аэроснимков. Кроме того, при аэросъёмке глубокие ущелья могут стереоскопически не просматриваться, т.к. контура, расположенные в ущелье, могут изобразиться только на одном аэроснимке. Также часть территории может быть закрыта небольшим облаком. Такие «мертвые зоны» доснимают наземной стереофотосъёмкой. Однако нужно отметить, что при наземной стереофотосъёмке процент наличия «мертвых зон» выше из-за того, что возвышенность или выступ на склоне могут закрыть территории, расположенные за ними, и приходится проводить дополнительные фотосъёмочные и геодезические работы.
29.2. Съёмочная аппаратура
При выполнении стереофотограмметрической съёмки использовались специальные аналоговые фотокамеры, в конструкции которых входило угломерное устройство, называемое ориентирующим устройством. Оно обеспечивало установку главной оптической оси фотокамеры в заданном направлении относительно базиса фотографирования. Фотосъёмка велась, в основном, на фотопластинки, хотя имелись фотокамеры, у которых была предусмотрена съёмка и на фотопластинки, и на фотоплёнки. Не у каждой фотокамеры имелся затвор, т.к. при фотографировании неподвижных объектов он не обязателен. Формат кадра, в основном, был прямоугольный. Длинная сторона кадра ориентировалась в горизонтальном направлении. В нашей стране использовались преимущественно фотокамеры фирмы К.Цейсс. Фототеодолитный комплект Photheo 19/1318 использовался при топографической съёмке и состоял из фотокамеры, теодолита, базисной рейки и трёх штативов. Универсальная фотограмметрическая камера UMK была создана для выполнения фотосъёмок прикладного характера. Стереофотограмметрическая камера SMK была предназначена для стереофотосъёмки с близких расстояний и динамических процессов. Она состояла из двух фотокамер, жестко укреплённых на штанге.
В связи с переходом на цифровые методы при наземной стереофотограмметрической съёмке стали использовать цифровые фотокамеры, а также лазерные сканирующие съёмочные системы.
29.3. Основные случаи наземной стереофотосъёмки
Наземная стереофотосъёмка какого-либо объекта выполняется с одной или нескольких фотостанций, состоящих из двух или трёх точек фотографирования. При этом можно применить следующие случаи стереофотосъёмки: общий, параллельный и конвергентный. Общий случай стереофотосъёмки характеризуется тем, что оптическая ось фотокамеры при перемещении с одной точки фотосъёмки на другую меняет своё пространственное положение, но при этом на соседних снимках изображается объект или его одни и те же части.
Параллельный случай стереофотосъёмки назван так, потому что оптическая ось фотокамеры при её перемещении не меняет своего положения в пространстве. Параллельный случай делится на нормальный, равномерно-откло-нённый и равномерно-наклонённый. Если оптическая ось фотокамеры перпендикулярна к базису фотографирования (рис. 25), то такой случай стереофотосъёмки называют нормальным (от слова нормаль). При равномерно-от-клонённом и равномерно-наклонён-ном случаях стереофотосъёмки оптические оси, сохраняя взаимную параллельность, отклоняются от перпендикуляра к базису влево-вправо или от горизонтальной плоскости вверх-вниз.
Если оптические оси соседних снимков отклонены навстречу друг к другу, то этот случай стереофотосъёмки называют конвергентным (от латинского слова, означающего сходимость). Т.к. в настоящее время обработка снимков производится на ЦФС, параллельность оптических осей можно строго не соблюдать и применять общий случай стереофотосъёмки. Следовательно, фотокамера может не иметь ориентирующего устройства.
29.4. Расчёт наземной стереофотосъёмки
Большое влияние на точность и экономичность фотограмметрических определений оказывает выбор оптимальных параметров наземной стереофотосъёмки, к которым относятся: отстояния точек фотографирования от объекта, базис фотографирования, фокусное расстояние фотокамеры. Необходимо учитывать, что на наземном фотоснимке измеряют координаты x и z (рис. 25), а отстояния точек объекта от фотокамеры определяются вдоль оси Y. Для удобства расчёта параметров наземной стереофотосъёмки используют формулы связи координат точек объекта и их изображений на стереопаре нормального случая:
Из этих формул выводятся формулы расчёта точности определения координат.
где mх и mz — точности измерения координат точек объекта на снимке, mp — точность измерения на стереопаре продольного параллакса, b = B f / Y — базис фотографирования в масштабе снимков.
Из формул (18) видно, что точность определения координат точек объекта будет уменьшаться с увеличением отстояний Y точек от фотостанции и с уменьшением базиса В фотографирования. Т.к. точность определения координат точек объекта задаётся заранее, максимальное отстояние Ymax фотокамеры от объекта, где ещё будет получена заданная точность mY, можно рассчитать по формуле выведенной из формулы (18) расчёта точности определения отстояния Y.
Минимальное отстояние зависит от высоты объекта и её рассчитывают по формуле где DZ — максимальная высота объекта на местности, а lZ — длина стороны кадра вдоль оси Z.
Минимально допустимую длину базиса фотографирования рассчитывают по формуле полученной из формулы (18) расчёта точности определения отстояния Y.
Максимальное значение базиса фотографирования зависит от минимального отстояния Ymin переднего плана объекта (рис. 26), длины lХ стороны кадра вдоль базиса фотографирования и фокусного расстояния фотокамеры, т.е. максимальный базис это длина стороны кадра вдоль базиса фотографирования в масштабе снимка. Связь этих величин соответствует расположению изображений m и m’ ближней точки объекта М на противоположных краях левого
и правого снимков. Точки объекта, расположенные ближе, чем точка М, не будут изображаться на обоих снимках, а расположенные слева или справа будут изображаться только на одном снимке. Таким образом, область стереоскопического восприятия будет охватывать участок местности в виде клина с вершиной в ближней точке (на рисунке начало этой области показано штриховкой).
Таким образом, при выборе места расположения фотостанции точки фотографирования SЛ и SП нужно располагать на расстоянии В, значение которого не должно выходить за пределы Bmin < B < Bmax.
В городских условиях наземная стереофотосъёмка архитектурных сооружений отстояние фотокамеры от строения ограничивается шириной улицы, а внутри здания — размерами его помещений. Таким образом, эти отстояния можно измерить достаточно точно, поэтому конечная точность зависит от размера базиса фотографирования, который рассчитывают по формуле, где lХ — размер кадра вдоль базиса фотографирования, РX — процент продольного перекрытия.
Если строение длинное и высокое, то фотосъёмку выполняют по примеру аэрофотосъёмки. С земной поверхности выполняют фотосъёмку его нижней части. Базисы фотографирования устанавливают по створной линии, примерно параллельной плоскости фасада. Тогда правый снимок первого базиса будет левым снимком второго базиса и т.д. Получается маршрутная фотосъёмка. В этом случае процент продольного перекрытия PX задают примерно 60% и число базисов вычисляют по формуле, где DX — длина строения.
Для фотосъёмки верхней части строения либо отклоняют оптическую ось фотокамеры вверх, либо фотосъёмку выполняют из окон и с балконов противоположного строения или же используют автоподъёмник. При втором варианте фотокамеру поднимают на высоту, вычисленную по формуле, где lZ — размер кадра вдоль оси Z, РZ — процент поперечного перекрытия между снимкам, который задают, примерно, 30-40%.
Число маршрутов nZ можно вычислить по формуле, где DZ — высота строения.
29.5. Полевые и камеральные работы
В полевые работы входят: рекогносцировка местности, геодезические измерения, фотографирование, фотолабораторные работы при съёмке аналоговой фотокамерой, дешифрирование. В ходе рекогносцировки местности:
— уточняют границы съёмочного участка;
— устанавливают расположение пунктов государственной геодезической сети;
— выбирают места расположения фотостанций. При выборе мест расположения фотостанций исходят из условия, что фотографирование всего участка должно быть произведено с наименьшего их числа. При этом число «мертвых» пространств на стереоскопическом изображении должно быть сведено к минимуму с целью сокращения затрат на досъёмку;
— намечают способы привязки станций к геодезической сети и определения координат опорных и контрольных точек.
После выбора положения фотостанции устанавливают границы рабочих площадей каждой стереопары, которые будут получены на этой фотостанции, и в пределах этих площадей намечают опорные и контрольные точки. Если нужно, их маркируют. В ходе выполнения на фотостанции геодезических работ измеряют геодезические координаты точек фотографирования и контрольных точек, длину базиса фотографирования. Средние погрешности в положениях точек фотографирования, опорных и контрольных точек не должны превышать 0,2 мм в масштабе создаваемой карты, а по высоте 0,2 от высоты сечения рельефа, выбранной для создаваемой карты.
Фотографирование местности (объекта) производят во время её наилучшей освещённости. Фотосъёмку с обоих концов базиса проводят в минимально короткий промежуток времени, чтобы оба снимка стереопары были получены при одинаковых условиях освещённости. При фотосъёмке цифровой фотокамерой и наличии компьютера (ноутбука) снимки вводят в компьютер, на котором выполняют маркирование опорных и контрольных точек и наносят результаты полевого дешифрирования. Если съёмка выполняется аналоговой фотокамерой, то экспонированные фотопластинки (фотоплёнки) проявляют на фотостанции, чтобы избежать возможного брака при определении выдержки или по другим причинам. С полученных негативов изготавливают контактные отпечатки, на которых отмечают контрольные точки и наносят результаты полевого топографического дешифрирования.
Камеральная фотограмметрическая обработка наземных фотоснимков производится так же, как и обработка аэроснимков. Но наземные фотоснимки имеют перед аэроснимками преимущество — их элементы внешнего ориентирования определяют геодезическими измерениями и, следовательно, их обработка упрощается. Результаты фотограмметрической обработки наземных фотоснимков могут быть представлены каталогом координат точек объекта или совокупностью данных цифровой модели поверхности сооружения, графическими чертежами, планами, развертками, профилями, фотопланами и фотосхемами.
29.6. Определение деформаций объекта
Определение деформаций объекта производят чаще различными геодезическими методами, позволяющими уловить весьма малые перемещения. Однако они не дают возможности фиксировать перемещение всех точек в один и тот же момент времени. В этом отношении фотограмметрические методы имеют преимущество, хотя по точности они уступают геодезическим методам.
Определения деформаций фотограмметрическими методами выполняют путём сравнения между собой снимков объекта, полученных до и после появления деформаций. Для определения деформаций используются как одиночные снимки, так и стереопары. Одиночные снимки позволяют определить деформации в плоскости, параллельной плоскости снимка. По стереопарам выявляют пространственные смещения точек объекта.
Параметры фотосъёмки рассчитывают, исходя из заданной точности определения деформации. Для фотосъёмки одиночными снимками основным параметром является отстояние; для стереофотосъёмки — отстояние и базис фотографирования. С целью повышения точности определения деформаций выполняют многократную фотосъёмку объекта. Перед фотосъёмкой на поверхности объекта производят маркировку точек, смещения которых нужно определить, и точек, которые являются неподвижными (заранее известно, что они не будут смещаться). Эти точки используют в качестве опорных.
Существует два способа определения деформаций: 1) нулевого базиса и 2) стереофотограмметрический.
Способ нулевого базиса или способ смещений используется тогда, когда деформационные процессы происходят в плоскости, параллельной плоскости снимка. Фотосъёмки выполняют при следующих условиях:
— используется одна и та же фотокамера;
— главная оптическая ось фотокамеры является перпендикуляром к плоскости, в которой нужно определить смещения;
— пространственная ориентация фотокамеры должна быть неизменной;
— отстояние Y фотокамеры от исследуемого объекта измеряется либо непосредственно, либо по стереопаре, которую получают со вспомогательного базиса фотографирования.
Формулы расчёта смещений DX и DZ точек объекта имеют вид:
где x1, z1 — координаты, измеренные на снимке первого сеанса,
X1, Z1 — координаты точки объекта, вычисленные по координатам x1, z1,
x2, z2 — координаты, измеренные на снимке второго сеанса,
X2, Z2 — координаты точки объекта, вычисленные по координатам x2, z2.
Ожидаемую точность определения деформации этим способом рассчитывают по формулам:
На основании этих формул можно сделать вывод, что точность определения деформации будет возрастать с уменьшением отстояний и увеличением фокусного расстояния фотокамеры.
Стереофотограмметрический способ позволяет определять деформации на объекте вдоль трёх координатных осей. В этом случае производят фотосъёмку с одного и того же базиса до и после деформации. Расчёты выполняют по формулам:
где xл1, xп1, xл2, xп2, zл2, zл1 — абсциссы и аппликаты точки, измеренные на левом и правом снимках стереопар, полученных до и после деформации, b — базис фотографирования в масштабе снимков.
Точность определения деформации стереофотограмметрическим способом можно повысить, если измерения снимков вести по способу нулевого базиса. В этом случае формулы определения деформаций будут иметь вид:
где xl, Dxl, z1, Dz1 — измеренные значения координат точек на снимках, полученных с левого конца базиса до и после деформации;
x2, Dx2, z2, Dz2 — измеренные значения координат точек на снимках, полученных с правого конца базиса до и после деформации.
Однако повышение точности определения деформаций будет только вдоль координатных осей, параллельных плоскости снимка, и будет соответствовать способу нулевого базиса.
29.7. Определение направления и скорости водного потока
При исследовании состояния водной среды в данном районе помимо определения таких показателей как характеристики волнения водной поверхности, глубина, а также температура, солёность и химический состав воды на разных глубинах необходимо определять скорость и направления течений. Для этих целей можно применить фотограмметрическую съёмку.
Фотосъёмку можно выполнять как с самолета, так и с берега. Предварительно в полосе съёмки разбрасывают поплавки. На снимках, кроме поплавков, должны изображаться неподвижные объекты: контуры береговой полосы, острова, искусственные сооружения и т.п. На самолёте под крыльями в специальных гондолах подвешивают две фотокамеры и проводят фотосъёмку через заданный интервал времени. По одиночным стереопарам определяют положения поплавков относительно неподвижных объектов. Затем по разностям координат поплавков, полученных на последовательных стереопарах, рассчитывают направления смещения поплавков и скорости их смещений.
Такой же способ можно применить при фотосъёмке с берега реки двумя фотокамерами, у которых должно быть одновременное срабатывание затворов. В отличие от аэросъёмки фотокамеры стоят неподвижно и элементы внешнего ориентирования снимков не меняются.
Скорость водного потока рассчитывают по формуле
где Dt — интервал времени между последовательными срабатываниями затворов фотокамер,
DD — перемещение поплавка с потоком за время Dt,
DХ, DY — изменения координат поплавка за время Dt, определённые по измерениям стереопар и вычисленные по формулам
где x’, p’ — абсцисса и продольный параллакс точки изображения поплавка на исходной стереопаре,
x», p» — абсцисса и продольный параллакс точки изображения поплавка на стереопаре, полученной через интервал времени Dt,
B — базис фотографирования,
f — фокусное расстояние фотокамеры.
Точность определения скорости потока рассчитывают по формуле, где mDt — точность измерения интервала времени.
29.8. Принцип съёмки объектов наземным лазерным сканером
В последние годы трёхмерное лазерное сканирование находит всё большее применение при сборе цифровой информации о различных объектах. Лазерный сканер используется как при аэрофотосъёмке, так и при наземной фотосъёмке. В английской литературе используется название LIDAR (лидар) — Light Identification, Detection and Ranging. Трёхмерное лазерное сканирование позволяет получать не только цифровую информацию о его форме, размерах и пространственном положении в заданной системе координат практически в режиме реального времени, но изображение поверхности объекта. Сочетание лазерного сканирования с фотосъёмкой цифровой фотокамерой облегчает дешифрирование отдельных элементов объекта, повышает качество создаваемых цифровых моделей, фотопланов и планов.
Наземное лазерное сканирование используют для получения детальных численных характеристик строений, инженерных объектов (мостов, эстакад, трубопроводов, линий электропередач, карьеров, тоннелей и т.д.) и их трехмерных цифровых моделей. Например, проведение лазерной сканирующей съёмки в карьерах до и после проведения земляных работ позволяет оперативно определять объём извлечённой земляной массы. Лазерное сканирование применяют не только для съёмки объектов снаружи, но и внутри. В результате получают цифровые модели, полностью характеризующие внешнее и внутреннее строение объекта. Т.к. положения точек объекта сразу же фиксируются в единой системе координат, их взаимные положения обеспечиваются с точностью, которая определяется точностью лазерного сканера и его расстоянием от объекта.
Принцип действия лазерного сканера (рис. 27) похож на принцип действия лазерного дальномера. Лазер излучает световые импульсы с большой частотой (десятки тысяч импульсов в секунду). Импульсы, дойдя до поверхности объекта, отражаются и возвращаются обратно. Они улавливаются высокочувствительным приёмником. В результате измеряется расстояние от сканера до объекта: , где v — скорость распространения светового импульса, t — время прохода импульса прямо и обратно.
Одновременно с помощью сервомоторов оптический луч перемещается в вертикальной и горизонтальной плоскостях, как бы «прощупывая» поверхность объекта. Положение луча в системе координат сканера фиксируется углами τ (в горизонтальной плоскости) и n (в вертикальной плоскости). Координаты текущей точки вычисляются по формулам.
Если нужно получить координаты в другой системе координат, то используют формулы, где XS, YS, ZS — координаты начала системы координат сканера в системе координат, например, геодезической или системе координат объекта. Часто привязку положения сканера выполняют с использованием GPS-приемников и электронных тахеометров.
Современные сканеры имеют возможность работать аналогично тахеометру. Благодаря встроенному двухосевому компенсатору положение главной точки инструмента работа сканера на одной позиции контролируется в течение всего периода. Помимо этого, в сканер устанавливаются программы из стандартного набора тахеометра: привязка к точке с известными координатами (определение высоты прибора, измерение дирекционного угла), различные виды прямых и обратных засечек и вынос точек в натуру.
Кроме координат в сканере регистрируется интенсивность отражённого сигнала, которая зависит от свойств отражающей поверхности, угла между нею и лазерным лучом, а также от расстояния до объекта. Фактически получаемый параметр интенсивности есть ничто иное, как мощность возвращаемого сигнала. Встроенная цифровая фотокамера обеспечивает получение цветного изображения. Изображения, полученные с помощью сканера, фиксируются в заданных направлениях, при которых они получены, и тем самым создаётся «сферическое» изображение, состоящее из множества снимков. Подобное изображение может быть использовано для «расцвечивания» измеренных точек в цвета более привычные для человеческого глаза.
По окончании сеанса сканирования получается набор трёхмерных измерений, описывающих поверхность объекта (её называют «облаком» точек). Каждая точка имеет три координаты и цвет, характеризующий уровень интенсивности принятого сигнала. С увеличением расстояния от сканера до объекта интенсивность оптического луча уменьшается за счёт его рассеивания, а также увеличивается расходимость луча. Соответственно, падает точность измерений и разрешающая способность получаемого изображения. Например, при дальности 50 м точность определения положения точки равна примерно 6 мм, а точность измерения расстояния около 4 мм.
- Кадастровые картографические документы
В качестве кадастровых картографических документов используются:
— контактные или увеличенные снимки,
— простые или уточнённые фотосхемы,
— стереофотосхемы,
— фотопланы (ортофотопланы),
— фотокарты,
— карты и планы.
Одиночные снимки используют при составлении земельно-кадастровых планов на равнинную сельскую местность. Контура переносят с контактного отпечатка на основу плана или снимок увеличивают до нужного масштаба и на нём вычерчивают кадастровую информацию.
Инфракрасные (тепловые) снимки применяют для контроля теплотрасс и теплоизоляции.
Основные области применения космических снимков:
— обновление карт масштаба 1:10000 и мельче,
— контроль использования земель (загрязнение, незаконные постройки и т.д.),
— ряд задач мониторинга земель.
Фотосхемы создают из нетрансформированных снимков и используют при дешифрировании. Уточнённые фотосхемы создают из снимков, увеличенных до заданного масштаба, и наносят на них координатную сетку. В равнинной местности они могут быть картографическим материалом первого приближения для нанесения кадастровой информации. Стереофотосхемы представляют собой две маршрутные фотосхемы, смонтированные из чётных и нечётных снимков. Их можно использовать для дешифрирования контуров равнинной и всхолмленной местности.
Фотопланы (ортофотопланы) несут большую контурную нагрузку, поэтому они широко используются для решения широкого круга задач кадастра.
Фотокарты представляют собой растровое изображение, полученное в проекции топографической карты и с требуемой точностью в плане и по высоте, с нанесённой на него кадастровой информацией.
Технологии создания перечисленных кадастровых картографических документов такие же, как и при создании аналогичных топографических материалов. Особенность состоит в том, что на них горизонтали либо не изображаются, либо изображаются с меньшей точностью. В связи с этим можно не проводить съёмку рельефа, а горизонтали перенести с карты более мелкого масштаба.
Периодичность обновления картографических документов зависит от назначения этих документов и степени их старения.
- Если изменения контуров коснулись более 30% контурной нагрузки кадастровой карты (плана), то её создают заново.
- Если же изменения контуров не превышают 30%, то производят обновление карты (плана).
Технологические схемы обновления кадастровых карт (планов) аналогичны применяемым схемам при обновлении топографических карт. Для этого используют материалы как новой аэро- или наземной стереофототопографической съёмки, так и наземной геодезической съёмки. Перенесение новой ситуации со снимков на план выполняют на ЦФС. Координаты опорных точек могут быть взяты из материалов прежних съёмок, если эти точки надёжно опознаются на снимках новой съёмки. Если на кадастровой карте нужно обновить рельефную часть, то горизонтали переносят на неё с обновлённой топографической карты.
Литература
- Михайлов А.П., Чибуничев А.Г. Конспект лекций по курсу фотограмметрия (в электронном виде). МИИГАиК, 2005.
- Краснопевцев Б.В. Фотограмметрия. -М.: МИИГАиК, 2008. -160 с. (в библиотеке МИИГАиК).
- Инструкция по фотограмметрическим работам при создании цифровых топографических карт и планов. -М.: ЦНИИГАиК, 2002. -100 с.
- ГОСТ 21667-76. Картография. Термины и определения.
- ГОСТ 22268-76. Геодезия. Термины и определения.
- ГОСТ 28441-99. Картография цифровая. Термины и определения.
- ГОСТ 51833-2001. Фотограмметрия. Термины и определения.
- ГОСТ 51605-2000. Карты цифровые топографические. Общие требования.
- ГОСТ 51606-2000. Карты цифровые топографические. Система классификации и кодирования цифровой картографической информации.
- ГОСТ 51607-2000. Карты цифровые топографические. Правила цифрового описания картографической информации. Общие требования.
- ГОСТ 51608-2000. Карты цифровые топографические. Требования к качеству цифровых топографических карт.
- Инструкция по топографической съёмке в масштабах 1:5000, 1:2000,1:1000 и 1:500. ГКИIШ-02-033-82. -М.: Недра, 1985. -151 с.
- Условные знаки для топографических планов масштабов 1:5000, 1:2000,1:1000 и 1:500. -М.: Недра, 1984
КОНТРОЛЬНАЯ РАБОТА
После изучения теоретической части методического пособия необходимо выполнить четыре задания, входящие в контрольную работу.
ЗАДАНИЕ № 1
В рукописном виде необходимо ответить на следующие вопросы.
- Что такое цифровая модель местности (цифровая карта)?
- Что такое пространственные данные? Привести примеры.
- Для чего предназначена цифровая фотограмметрическая система? Перечислить основные продукты фотограмметрической обработки.
- Продольный и поперечный параллаксы и их смысл.
- Перечислить системы координат, применяемые в фотограмметрии.
- Дать определение элементам внутреннего ориентирования снимка.
- Дать определение элементам внешнего ориентирования снимка.
- Указать источники геометрических искажений сканированных аналоговых снимков.
- Что определяет точность измерения цифровых изображений и способы её увеличения.
- Условия получения стереопары.
- Назвать способы получения исходной информации о рельефе.
- Назвать способы представления ЦМР.
- Назвать способы получения ЦМР при обработке стереопар снимков на ЦФС.
- Назначение фототрансформирования снимков.
ЗАДАНИЕ № 2
Рассчитать точность определения координат и высот точек местности по стереопаре снимков. Характеристики фотокамеры взять из табл. 1.
Данные для расчётов формируются из двух таблиц:
а) из табл. 1 выбираются данные, соответствующие последней цифре шифра студента,
б) из табл. 2 выбираются данные, соответствующие предпоследней цифре шифра.
Например, студент с шифром 59п-157 берёт:
— из табл. 1 данные, соответствующие варианту 7;
— из табл. 2 данные, соответствующие варианту 5.
Точность измерений координат и параллаксов принять равной 0,5 пикселя, т.е mx = my = mp = mq = m = 0,5 пикселя. В этом случае размер пикселя, указанный в табл. 1, надо умножить на 0,5.
Пример вычислений для варианта 7 (табл. 1) и варианта 5 (табл. 2).
Исходные данные:
— стереопара снимков получена цифровой среднеформатной камерой
Hasselblad H4d 60 с размером пикселя матрицы 6 мкм;
— фокусное расстояние f = 81,8 мм или 13633 пикселя;
— формат кадра 40,2×53,7 мм или 6708×8956 в пикселях, соответственно;
— короткая сторона кадра направлена вдоль полета;
— продольное перекрытие p = 60%.
Размер пикселя на земле вычисляется по формуле:
Точность определения плановых и высотных координат вычисляется по формулам:
Базис фотографирования в масштабе снимка b получим по формуле:
или в пикселях
Рассчитаем точность определения координат точек на местности mX, mY, mZ.
Поскольку в инструкции по фотограмметрическим работам принято указывать точность плановых координат вдоль радиуса-вектора, рассчитаем её по формуле:
Вывод.
Точность определения координат по стереопарам для предложенных параметров следующая:
— в плане mXY = 0,1 м;
— по высоте mZ= 0,37 м.
ЗАДАНИЕ № 3.
С учетом выполненного задания № 2 сделать вывод: пригодна ли фотокамера и параметры аэросъёмки для создания карты масштаба 1:1000 с сечением рельефа 1 м?
На основании выводов сделать рекомендации по выбору фотокамеры (любой из предложенного списка в таблице № 1) и оптимальных параметров аэросъёмки. Рекомендации обосновать расчётами.
Пример решения задания.
В соответствии с инструкцией по фотограмметрическим работам [3], средние расхождения на опорных точках после уравнивания фототриангуляции должны удовлетворять следующим требованиям:
а) остаточные средние расхождения плановых координат опорных точек должны быть не хуже 0,2 мм, умноженные на знаменатель масштаба карты Мк, т.е. mXY = 0,2 Мк.
б) остаточные средние расхождения высот не должны превышать 0,15, умноженные на высоту сечения рельефа, т.е. mZ = 0,15hсеч.
Для карты масштаба 1:1000 и сечением рельефа hсеч = 1 м получаем:
mXY = 0,2 Мк = 0,2 х 1000 = 0,2 м,
mZ = 0,15 hсеч = 0,15 x 1 = 0,15 м.
Приведенные расчёты показывают, что точность в плане вполне обеспечивается, поскольку расчётное значение ожидаемой плановой точности 0,1 м, а вот расчётная точность определения высот — 0,37 м, что более чем в два раза ниже требований в [3]: 0,15 м.
Чтобы удовлетворить требованиям точности по высоте необходимо выполнить аэросъёмку, например, с высоты 800 м. Тогда расчётная точность определения высоты будет следующая:
mZ = .
Другие способы повышения точности определения высоты могут быть связаны с увеличением базиса фотографирования или повышением точности измерений координат и параллаксов.
Вывод:
Предложенная в данном варианте съёмочная камера (Hasselblad H4d) с соответствующими параметрами аэросъёмки (Н = 2000 м и р = 60%) позволяет обеспечить плановую точность при создании карты масштаба 1:1000, а вот для создания оригинала рельефа с сечением 1 м необходимо изменить высоту аэросъёмки.
ЗАДАНИЕ № 4
Для заданных параметров фотокамеры и аэросъёмки (задания № 2) вычислить предельную погрешность определения высоты Dhпред по ЦМР при создании фотопланов и дать рекомендации по способу и точности построения ЦМР.
Пример выполнения задания.
Формула вычисления предельной погрешности определения высоты берется из инструкции по выполнению фотограмметрических работ [3]:
Dhпред =
где радиус рабочей площади снимка r определяется по формуле:
r =
Тогда при создании фотоплана отвечающего требованиям точности карты масштаба 1:1000 получим:
Dhпред =
Вывод
Полученный результат означает, что если перепад высот в пределах Рабочей площади данного снимка не превышает двойной величины Dhпред,
(2 х 0,7 = 1,4 м), то цифровое фототрансформировании снимка можно выполнить на среднюю плоскость (среднюю высоту местности в пределах данного снимка). В противном случае следует создавать матрицу высот с точностью определения высот не больше 0,7 м. Такая точность определения высот может быть обеспечена построением горизонталей по ЦМР с сечением 2 м, что согласуется с требованием к построению горизонталей с точностью hсеч/3.
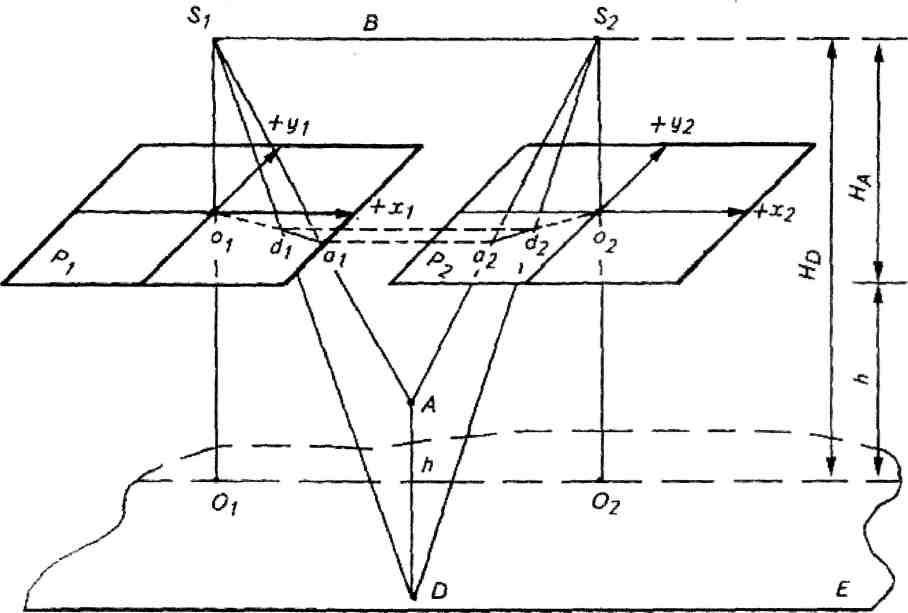
Прикрепленные файлы:
или напишите нам прямо сейчас:
⚠️ Пожалуйста, пишите в MAX или заполните форму выше.
В России Telegram и WhatsApp блокируют - сообщения могут не дойти.
Прикрепленные файлы: |
|
|---|---|

|
Администрация сайта не рекомендует использовать бесплатные работы для сдачи преподавателю. Эти работы могут не пройти проверку на уникальность. Узнайте стоимость уникальной работы, заполните форму ниже: Узнать стоимость |

|
Скачать файлы: |
|
|
|