Вид работы: Контрольная работа
Предмет: Прикладная геодезия
или напишите нам прямо сейчас:
⚠️ Пожалуйста, пишите в MAX или заполните форму выше.
В России Telegram и WhatsApp блокируют - сообщения могут не дойти.
Контрольная работа по прикладной геодезии в МИИГАиК
Контрольная работа № 1
ПРОЕКТ РАЗБИВОЧНОЙ СЕТИ СТРОИТЕЛЬНОЙ ПЛОЩАДКИ
Исходные данные:
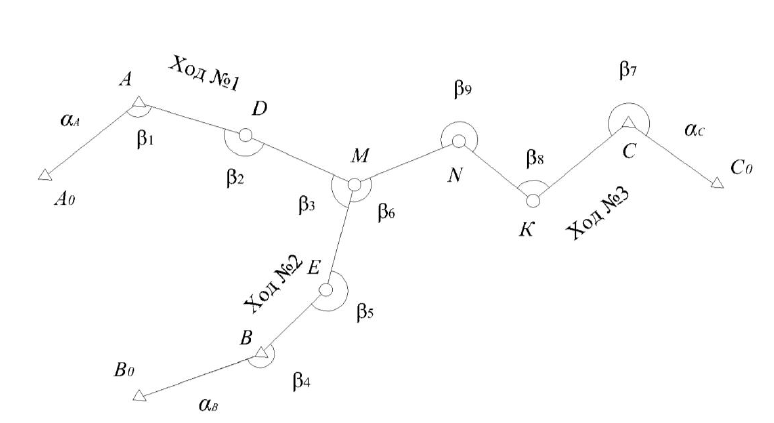
- Разбивочная сеть представляет собой систему из трёх полигонометрических ходов, проложенных по магистральным трассам города и образующих узловую точку М.
- Каждый из полигонометрических ходов опирается на исходные пункты с известными координатами, полученными из спутниковых наблюдений:
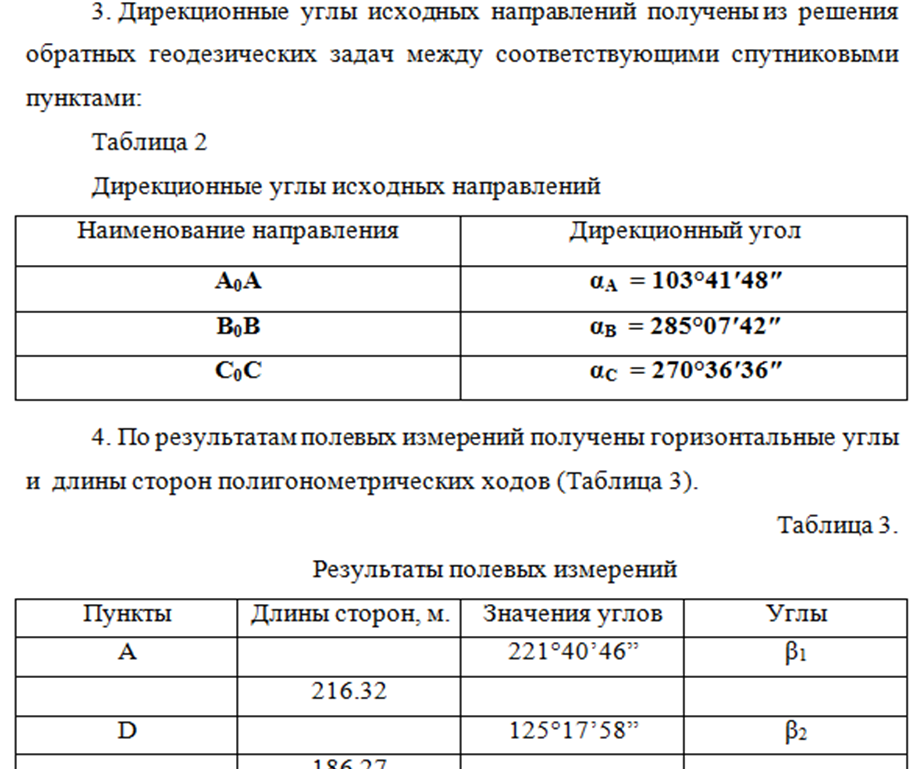
- Дирекционные углы исходных направлений получены из решения обратных геодезических задач между соответствующими спутниковыми пунктами:
- По результатам полевых измерений получены горизонтальные углы и длины сторон полигонометрических ходов.
Решение задачи состоит в уравнительных вычислениях, имеющих целью получение вероятнейших координат пунктов сети. Задача уравнивания ходов заключается в увязке горизонтальных углов, приращений координат, а также в вычислении координат точек ходов. Уравнивание выполним способом средневзвешенных значений.
Путём вычислений по каждому из отдельных ходов находят дирекционные углы какой либо стороны при узловой точке, скажем стороны MN и вероятнейшее значение её дирекционного угла вычисляют как среднее весовое. Затем горизонтальные углы по отдельным ходам увязывают как между твёрдыми дирекционными углами.
После увязки горизонтальных углов вычисляют дирекционные углы, приращения координат и координаты узловой точки по ходам от твёрдых точек А, В, С. По трём координатам точки М находят их вероятнейшее значение как среднее весовое.
Принимают вероятнейшие координаты точки М как твёрдые и уравнивают приращения координат по каждому ходу, рассматривая их как разомкнутые ходы, опирающиеся на твёрдые пункты
Уравнивание измерений начинают с обработки ведомости координат пунктов полигонометрических ходов, которую составляют для каждого из трех образованных полигонометрических ходов.
В графы 1, 2 записывают названия точек и измеренные горизонтальные углы β, правые по ходу от опорных пунктов к узловой точке М. По каждому ходу подсчитывают сумму углов.
При узловой точке берут узловую линию МN, для которой вычисляют дирекционные углы по каждому ходу от исходных дирекционных углов αА, αВ, αС. Для узловой линии MN по каждому из ходов AM, BM, CM получают значения дирекционных углов
Заносим вычисленные значения диреционных углов в таблицу 7 для вычисления средневесового значения дирекционного угла узловой линии МN.
Приняв в качестве веса, величину, обратную n (число вершин хода), вычисляют веса по каждому ходу: p=1/n и рассчитывают вероятнейшее значение дирекционного угла стороны MN как по неравноточным результатам.
Для этого предварительно примем наименьшее значение дирекционного угла за величину α0=89°10’50” и вычислим отклонения найденных дирекционных углов от принятого значения в секундах
a=αi-α0
Вычисленные отклонения заносим в графу 5 таблицы 7 и умножаем на вес измерений (графа 6)
В таком случае средневзвешенное значение дирекционного угла вычислим по формуле
- α_MN=α_0+(∑▒〖p_i∙a_i 〗)/(∑▒p_i )
Полученное значение дирекционного угла принимают за твёрдое и вычисляют угловые невязки для каждого ходаfβ.
Полученные невязки углов распределяют поровну на каждый измеренный правый угол хода с тем же знаком невязки.
В графу 3таблиц 4-6 вписывают исправленные углы. По исправленным горизонтальным углам и исходным дирекционным углам вычисляют дирекционные углы сторон хода и результаты вписывают в графу 4, а румбы – в графу 5.
На основе длин линий (графа 6) и румбов вычисляют приращения координат и для каждого хода подсчитывают суммы приращений (Таблица 8-10).
По исходным координатам точек А, В, С и суммам приращений ходов вычисляют координаты узловой точки М.
Заносим вычисленные значения координат в Таблицы 11 и 12. За вес хода принимают величину, обратную длине хода, т. е. Р=k/L.
Для удобств вычислений коэффициентkздесь можно принять равным 2000.
Найдя веса для каждого хода, вычисляют среднее весовое значение координат узловой точки М
- Х_M=(∑▒〖p_i∙Х_i 〗)/(∑▒p_i )
- Y_M=(∑▒〖p_i∙Y_i 〗)/(∑▒p_i )
Для упрощения расчетов можно также принять минимальные значения координат Х и Y принять за начальные значения Х0=71006,664, Y0=7669,118 и вычисляют отклонения от начальных значений по формулам
- bi=Xi – X0
- ci=Yi – Y0
и заносят в графу 5 таблиц 11 и 12 соответственно. Умножаем полученне отклонения на вес измерений (графа 6).
Вероятнейшие значения координат в таком случае вычисляют по формулам:
- X_M=X_0+(∑▒〖p_i∙b_i 〗)/(∑▒p_i )
- Y_M=Y_0+(∑▒〖p_i∙c_i 〗)/(∑▒p_i )
Принимая полученные вероятнейшие координаты точки М за твёрдые, вычисляют невязки в приращениях координат по каждому ходу.
Полученные невязки ходов с обратным знаком распределяют на приращения пропорционально длинам линий.
Исправленные приращения координат записывают в графы 9 и 10. Далее вычисляют координаты всех точек. На этом заканчивается вычисления полигонометрических ходов с одной узловой точкой.
Прикрепленные файлы:
или напишите нам прямо сейчас:
⚠️ Пожалуйста, пишите в MAX или заполните форму выше.
В России Telegram и WhatsApp блокируют - сообщения могут не дойти.
Прикрепленные файлы: |
|
|---|---|

|
Администрация сайта не рекомендует использовать бесплатные работы для сдачи преподавателю. Эти работы могут не пройти проверку на уникальность. Узнайте стоимость уникальной работы, заполните форму ниже: Узнать стоимость |

|
Скачать файлы: |
|
|
|