Вид работы: Задание
Тема: Теория механизмов и машин
или напишите нам прямо сейчас:
⚠️ Пожалуйста, пишите в MAX или заполните форму выше.
В России Telegram и WhatsApp блокируют - сообщения могут не дойти.
Методические рекомендации по выполнению задания.
Тема «Зубчатые передачи»
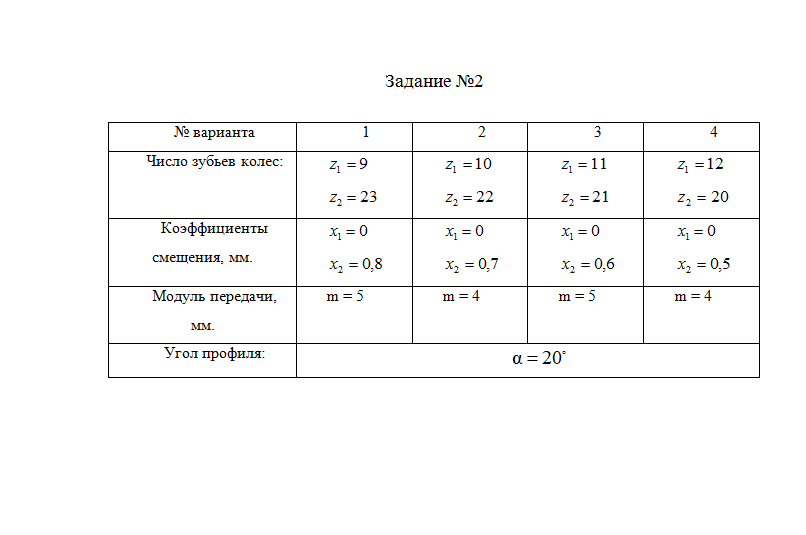
- Произвести геометрический расчет зубчатой передачи при заданных смещениях х1 и х2.
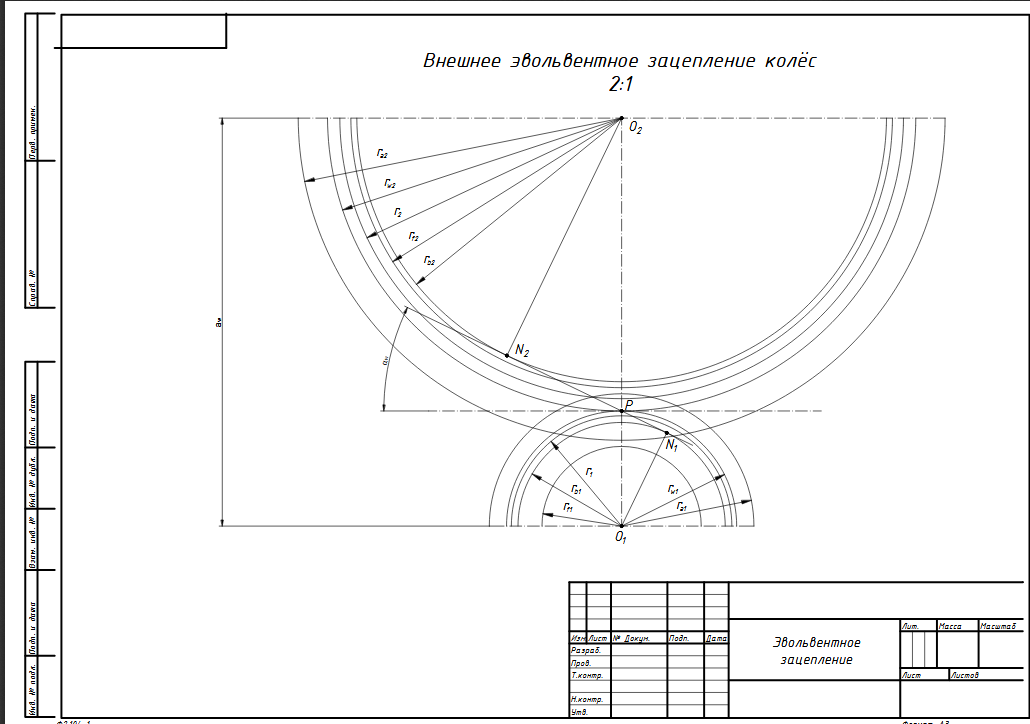
- Построить картину зубчатого зацепления.
При выполнении задания студент должен:
- Произвести геометрический расчет зубчатой передачи при заданных смещениях х1 и х2.
- Результаты расчетов занести в таблицу 2.1.
- После выполнения расчетов необходимо вычертить зубчатую передачу (Рис.2.1) в масштабе на бумажном листе формата А3, проставив все размеры. Чертежи также можно выполнить в графической программе Компас-3D (Версии 12–15) или в любой другой графической программе, но переслать по электронной почте в формате «Картинка», сохранив в JPEG или PDF. Можно выполнить чертеж на листе ватмана, затем также переслать в формате «Картинка».
Варианты заданий распределяются согласно алфавиту.
Пример: Допустим, задан зубчатый механизм, показанный на рисунке 3.1.
Число зубьев колес равняется:
Z1 = 16, Z2 = 60, Z2΄ = 18, Z3 = 30, Z4 = 28, Z5 = 26, Z6 = 24.
Угловая скорость звена 1: ω1 = 250 рад/с.
Модуль зубчатых колес: m = 2,5 мм.
Требуется найти число зубьев колеса 3′ (Z3΄= ?), и определить степень подвижности механизма W.
Решение. Степень подвижности данного механизма определяется по формуле Чебышева:
где
- n = 5 – число подвижных звеньев механизма (1, 2-2′, 3-3′, Н-5, 6);
- p5 = 5 – количество одноподвижных кинематических пар 5 класса (0-1, 2-0, 3-Н, Н-0, 6-0);
- p4 = 4 – количество двухподвижных кинематических пар 4 класса (1-2, 2′-3, 3′-4, 5-6).
Стойка – неподвижное звено, всегда имеет обозначение 0.
Рассчитаем, исходя из условия соосности, недостающее количество зубьев у колеса 3′. Условие соосности заключается в том, чтобы геометрические оси ведущего и ведомого валов совпадали. Составим условия соосности.
Следует отметить, что для каждого типа планетарного механизма оно индивидуальное:
- механизм а;
- механизм б;
- механизм в;
- механизм г.
Так как r – радиус делительной окружности равен , а модуль колес m = const, то есть одинаковый для всех звеньев механизма, то можно утверждать, что радиус колеса равен числу зубьев Z этого же колеса и можно записать условие соосности через числа зубьев колес:
- механизм а;
- механизм б;
- механизм в;
- механизм г.
В заданном многоступенчатом редукторе можно выделить три ступени (Рис. 3.3): А и С – простые ступени, Б – планетарная ступень.
Определим недостающее количество зубьев у колеса 3′, воспользовавшись условием соосности для планетарного механизма типа а.
Полное передаточное отношение редуктора будет равно произведению передаточных отношений ступеней, входящих в редуктор. Для схемы редуктора на рис. 3.3 полное передаточное отношение определяется по формуле:
Передаточное отношение ступени А, состоящей из зубчатых колес 1 и 2, определяется по формуле:
Аналогично определяем передаточное отношение ступени С, состоящей из зубчатых колес 5 и 6.
Знак плюс относится к внутреннему зацеплению, а знак минус – к внешнему.
Передаточное отношение заданного механизма (ступень Б) получаем из формулы Виллиса для планетарного механизма:
где m – количество внешних зацеплений.
Передаточное отношение всего механизма:
Прикрепленные файлы:
или напишите нам прямо сейчас:
⚠️ Пожалуйста, пишите в MAX или заполните форму выше.
В России Telegram и WhatsApp блокируют - сообщения могут не дойти.
Прикрепленные файлы: |
|
|---|---|

|
Администрация сайта не рекомендует использовать бесплатные работы для сдачи преподавателю. Эти работы могут не пройти проверку на уникальность. Узнайте стоимость уникальной работы, заполните форму ниже: Узнать стоимость |

|
Скачать файлы: |
|
|
|