или напишите нам прямо сейчас:
⚠️ Пожалуйста, пишите в MAX или заполните форму выше.
В России Telegram и WhatsApp блокируют - сообщения могут не дойти.
3. ПАТЕНТНО–ИНФОРМАЦИОННЫЕ ИССЛЕДОВАНИЯ
СПРАВКА
или напишите нам прямо сейчас:
⚠️ Пожалуйста, пишите в MAX или заполните форму выше.
В России Telegram и WhatsApp блокируют - сообщения могут не дойти.
о результатах патентных исследований
по теме выпускной квалификационной работы
Автоматизация процесса межоперационной загрузки и выгрузки рычагов стеклоочистителей на автоматической линии
Цель патентных исследований – установление уровня техники
- Задание на проведение патентного поиска
| Студент | Группа | Когда выдано |
| Осетров А.А. | Апб-113 | 01.02.2017 |
Предмет поиска Манипуляторы. Поточные линии
Страны поиска Россия, Евросоюз
Глубина поиска 20 лет
Руководитель ВКР
Таблица 2.1 – Результаты проведения патентного поиска
| Страна | № патента | Авторы | Название |
| РФ | № 2410235 2011 г. | Левин Сергей Владимирович (RU), Шалюхин Константин Андреевич (RU) | Манипулятор
|
| РФ | № 2521933 2014 г. | Горлатов Аркадий Спиридонович (RU)
| Манипулятор для передачи изделий
|
| РФ | №2063287 1997 г. | Жердицкий Н.Т. (RU), Костенко А.В. (RU) | Устройство для загрузки заготовок в пресс
|
| РФ | №2219037 2003 г. | Ларин А.М. (RU) | Загрузочно-разгрузочное устройство
|
| РФ | № 2368485 2009 г. | Общество с ограниченной ответственностью «СТП-РЕГИОН» (RU) | Автоматическая поточная линия для изготовления кожухов конвекторов
|
Патент РФ № 2410235 – Манипулятор
Изобретение относится к машиностроению, а именно к цикловым манипуляторам для перемещения объектов из одной позиции в другую. Манипулятор содержит основание, подвижное звено, захват и фиксирующие элементы, выполненные в виде электромагнитов. Сердечники электромагнитов закреплены на основании в крайних точках движения звена, а якорь закреплен на подвижном конце звена рядом с захватом. Противоположный от захвата конец звена выполнен с возможностью поворота вокруг оси, перпендикулярной основанию, а рядом с осью закреплен якорь электромагнитов предварительного изгиба подвижного звена. Сердечники с обмотками электромагнитов предварительного изгиба закреплены на основании симметрично относительно среднего положения звена. Компенсация потерь энергии при движении звена происходит как за счет притяжения фиксирующих электромагнитов, так и за счет увеличения начального изгиба звена электромагнитами дополнительного изгиба, что позволяет компенсировать потери энергии при движении звена и снизить требования с симметрии установки фиксирующих электромагнитов, что повышает надежность работы манипулятора (рисунок 3.1) [2].
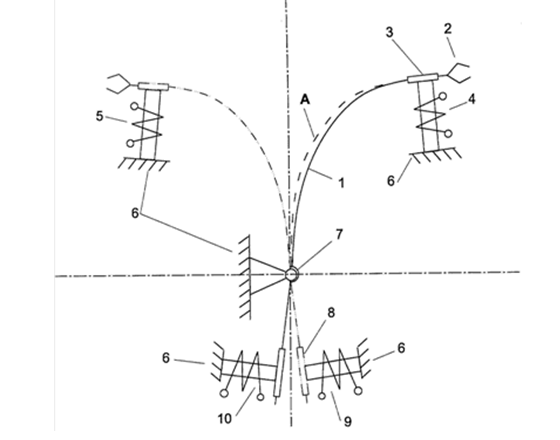
Рисунок 3.1– Манипулятор
Задача изобретения — повышение надежности работы манипулятора.
Указанная задача достигается тем, что в предлагаемом манипуляторе противоположный от захвата конец упругого звена выполнен с возможностью перемещения, например поворота вокруг оси, перпендикулярной основанию. На звене рядом с осью закреплен якорь электромагнитов, сердечники с обмотками которых закреплены на основании симметрично относительно среднего положения звена.
Проведенный заявителем поиск по научно-техническим и патентным источникам информации и выбранный из перечня аналогов прототип позволили выявить отличительные признаки в заявленном техническом решении, следовательно, заявленное устройство удовлетворяет критерию изобретения «новизна», а проведенный заявителем дополнительный поиск известных технических решений с целью обнаружения в них признаков, сходных с признаками отличительной части формулы заявленного технического решения, и сравнение свойств заявляемого и известных технических решений, обусловленных наличием в них указанных признаков показал, что, во-первых, не все признаки отличительной части формулы найдены в известных технических решениях, во-вторых, сопоставительный анализ свойств, обусловленных наличием некоторых отличительных признаков в известных решениях и в заявленном техническом решении, показал, что у заявленного решения проявляются свойства, не совпадающие со свойствами, проявляемыми указанными признаками в известных технических решениях, чем обуславливается достижение заявленного положительного эффекта, следовательно, заявленное техническое решение удовлетворяет критерию изобретения «существенные отличия».
На чертеже изображена кинематическая схема предлагаемого манипулятора. Подвижное звено 1 выполнено, например, в виде упругого элемента с закрепленными на его свободном конце захватом 2 и якорем 3 фиксирующих электромагнитов, сердечник с обмоткой которых 4 и 5 закреплены на основании 6 в крайних точках движения звена. Вместо захвата на конце звена может располагаться узел крепления следующего звена манипулятора или другой рабочий орган. Противоположный от захвата конец звена 1 имеет возможность ограниченного поворота относительно расположенной на основании 2 оси 7. На звене 1 рядом с осью 7 закреплен якорь 8 электромагнитов предварительного изгиба, сердечники с обмотками которых 9 и 10 закреплены на основании симметрично относительно среднего положения звена.
Манипулятор, содержащий основание, подвижное звено, выполненное, например, в виде плоского упругого элемента, захват, закрепленный на подвижном конце звена, и фиксирующие элементы, выполненные в виде электромагнитов, состоящих из сердечников с обмоткой, закрепленных на основании в крайних точках движения звена, и якоря, закрепленного на подвижном конце звена рядом с захватом, отличающийся тем, что противоположный от захвата конец звена выполнен с возможностью поворота вокруг оси, перпендикулярной основанию, и на нем рядом с осью закреплен якорь электромагнитов предварительного изгиба подвижного звена, сердечники с обмотками которых закреплены на основании симметрично относительно среднего положения звена.
Патент РФ № 2521933 — Манипулятор для передачи изделий
Изобретение относится к механизмам со сложным движением выходных звеньев, применяемым при обслуживании работы машин, станков, прессов. Манипулятор содержит передаточный механизм с ведущим, промежуточным и выходным звеньями, исполнительный механизм с ведущим звеном в виде зубчатой рейки, выходными звеньями, последние из которых снабжены губками для захвата изделий, и неподвижным копиром с фигурными пазами для взаимодействия с выходными звеньями исполнительного механизма и привод. Промежуточное звено передаточного механизма выполнено в виде кинематически связанных шатуна и диска, при этом шатун шарнирно связан с ведущим звеном, а на оси диска закреплено зубчатое колесо, сопряженное с ведущим звеном исполнительного механизма. Изобретение позволит упростить структуру кинематической цепи устройства, повысить производительность и точность выполнения операций, составляющих процесс передачи изделий. [3]
Задачей настоящего изобретения является упрощение структуры кинематической цепи устройства, повышение производительности и точности работы.
Решение поставленной задачи достигается тем, что в манипуляторе, содержащем передаточный механизм с ведущим, промежуточным и выходным звеньями, исполнительный механизм с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий, и привод, промежуточное звено передаточного механизма выполнено в виде кинематически связанных шатуна и диска, при этом шатун шарнирно связан с ведущим звеном, а на оси диска закреплено зубчатое колесо, сопряженное с ведущим звеном исполнительного механизма.
Кинематическая связь шатуна и диска выполнена в виде шарнира, при этом расстояние от центра шарнира до центра диска равно расстоянию от центра шарнира, связывающего шатун с ведущим звеном, до центра вращения ведущего звена, а расстояние между центрами шарниров на ведущем звене и диске — длина шатуна — равно расстоянию между центрами вращения ведущего звена и диска.
Выполнение промежуточного звена передаточного механизма в виде шатуна, кинематически связанного с диском, позволяет упростить кинематическую схему передаточного механизма путем уменьшения числа подвижных звеньев и кинематических пар
Равенство длины шатуна расстоянию между центрами вращения ведущего звена и диска позволяет иметь параллелограммный механизм, в котором ведущее звено и диск вращаются синхронно, при этом шатун совершает плоскопараллельное движение. Такой характер движения шатуна обеспечивается, поскольку отстояние шарниров на ведущем звене и диске от центров вращения соответственно ведущего звена и диска выполнено одинаковым.
- Манипулятор для передачи изделий, содержащий передаточный механизм с ведущим, промежуточным и выходным звеньями, исполнительный механизм с ведущим звеном в виде зубчатой рейки, выходными звеньями, последние из которых снабжены губками для захвата изделий, и неподвижным копиром с фигурными пазами для взаимодействия с выходными звеньями исполнительного механизма и привод, отличающийся тем, что промежуточное звено передаточного механизма выполнено в виде кинематически связанных шатуна и диска, при этом шатун шарнирно связан с ведущим звеном, а на оси диска закреплено зубчатое колесо, сопряженное с ведущим звеном исполнительного механизма.
- Манипулятор по п.1, отличающийся тем, что кинематическая связь шатуна и диска выполнена в виде шарнира, при этом расстояние от центра шарнира до центра диска равно расстоянию от центра шарнира, связывающего шатун с ведущим звеном, до центра вращения ведущего звена, а расстояние между центрами шарниров на ведущем звене и диске равно длине шатуна и расстоянию между центрами вращения ведущего звена и диска.
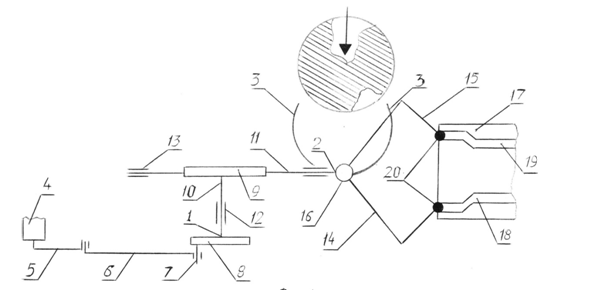
Рисунок 3.2 – Манипулятор для передачи изделий
Патент РФ №2063287- Устройство для загрузки заготовок в пресс
Использование: изобретение относится к горячей безоблойной прецизионной штамповке компактного материала в разъемных штампах. Существо: устройство содержит захватный орган заготовок с подпружиненными губками, механизм его возвратно-поступательного перемещения с приводом от пневмоцилиндра, ограничитель, упор, электрические системы управления, размыкатель губок, а рейка размыкателя выполнена с продольной прорезью, связана со штоком цилиндра и подпружинена, имеет возможность перемещаться совместно со штоком или поперек штока при выключенном цилиндре. [4].
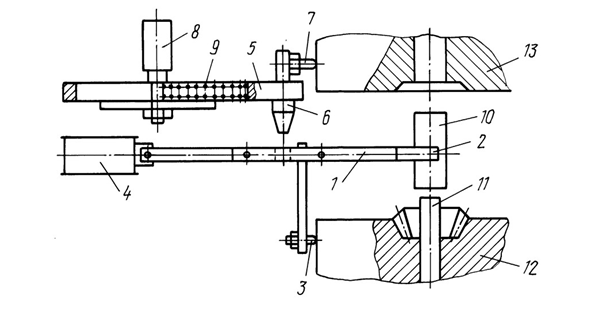
Рисунок 3.3 – Устройство для загрузки заготовок в пресс
Задачей изобретения является точная установка заготовки и ее фиксация а межштамповом пространстве разъемного штампа, полученной из мерного сортового проката и имеющей длину в 2.2,5 раза больше ее диаметра, когда конструктивный размер нижнего выталкивателя штампа меньше диаметра заготовки в 2,5.3 раза.
Для достижения этой задачи в известном устройстве для установки заготовок в пресс, содержащем захватный орган заготовок с подпружиненными губками, механизм его возвратно-поступательного перемещения с приводом от пневмоцилиндра, ограничитель, упор, а также электрические системы управления, оно дополнительно снабжено размыкателем губок, а рейка размыкателя выполнена с продольной прорезью, связана со штоком цилиндра и подпружинена, имеет возможность перемещаться совместно со штоком или поперек штока при выключенном цилиндре.
На рисунке 3 изображено устройство для загрузки заготовок. Оно включает клещевой захват 1 с подпружиненными губками 2, упор 3. Клещевой захват 1 соединен со штоком пневмоцилиндра 4. На рейке 5 установлен размыкатель губок 6 и упор 7. Рейка 5 выполнена с продольной прорезью, в которой установлен шток цилиндра 8 и пружина 9. Она имеет возможность перемещаться совместно со штоком цилиндра 8, а также перпендикулярно штоку цилиндра 8 при выключенном цилиндре.
Это устройство предназначено для автоматизиции процесса прецизионной штамповки в разъемных штампах сателлитов дифференциала автомобилей семейства КамАЗ. В качестве заготовок используется мерный сортовый прокат, полученный с точностью по массе 1 г. Нагрев заготовок ведется в атмосфере защитного газа до температуры 1100oC.
Устройство для загрузки заготовок в пресс, содержащее захватный орган заготовок с губками, механизм его возвратно-поступательного перемещения с приводом от пневмоцилиндра, электрические системы управления, отличающееся тем, что оно снабжено механизмом размыкания губок, выполненным в виде рейки с продольной прорезью и размещенной в ней пружиной, размыкателя губок, закрепленного на рабочем конце рейки перпендикулярно ей и направленного к захватному органу своей рабочей частью, упора, закрепленного на другом конце размыкателя губок перпендикулярно ему, гидроцилиндра со штоком, размещенного в упомянутой прорези рейки перпендикулярно ей, при этом рейка установлена с возможностью перемещения совместно со штоком или перпендикулярно ему при выключенном цилиндре.
Патент РФ №2219037 — Загрузочно-разгрузочное устройство
Изобретение относится к машиностроению, в частности к загрузочным устройствам для загрузки заготовок и удаления обработанных деталей типа тел вращения со станков. Устройство содержит основание, установленный с возможностью поворота в вертикальной плоскости от соответствующего силового цилиндра питатель с двумя захватами, которые размещены с возможностью возвратно-поступательного перемещения относительно корпуса питателя от силового цилиндра. При этом захваты выполнены неподвижно относительно друг друга, а на оси качания питателя по его бокам установлены два рычага. Использование изобретения позволяет упростить конструкцию загрузочно-разгрузочного устройства и повысить надежность его в работе [5].
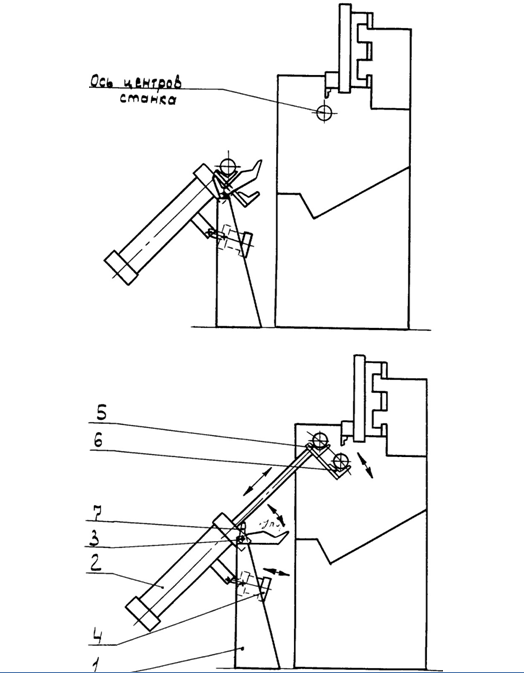
Рисунок 3.4 – Загрузочно-разгрузочное устройство
Технический результат, достигаемый данным изобретением, заключается в упрощении конструкции загрузочно-разгрузочного устройства и повышении надежности его работы.
Указанный технический результат достигается тем, что захваты загрузочно-разгрузочного устройства выполнены неподвижно относительно друг друга, а на оси качания питателя по его бокам установлены два рычага.
Изобретение иллюстрируется чертежом, где на Фиг.1 показано загрузочно-разгрузочное устройство в исходном положении; на фиг.2 — то же, с выдвинутыми захватами.
Загрузочно-разгрузочное устройство состоит из основания 1, питателя 2, способного поворачиваться вокруг оси 3 при помощи силового цилиндра 4, установленного на основании, неподвижных друг относительно друга двух захватов 5 и 6, рычагов 7.
Загрузочно-разгрузочное устройство, содержащее основание, установленный с возможностью поворота в вертикальной плоскости от соответствующего силового цилиндра питатель с двумя захватами, размещенными с возможностью возвратно-поступательного перемещения относительно корпуса питателя от силового цилиндра, отличающееся тем, что захваты выполнены неподвижно друг относительно друга, а на оси качания питателя по его бокам установлены два рычага.
Патент РФ № 2368485 — Автоматическая поточная линия для изготовления кожухов конвекторов
Изобретение относится к области машиностроения, в частности к автоматическим поточным линиям для изготовления кожухов конвекторов. Линия содержит последовательно соединенные средство подачи полосы тонколистовой стали, правильное средство, средство вырубки в листовой заготовке выемок и отверстий, средство гибки верхней и боковых формообразующих частей заготовки кожуха относительно средней части заготовок, средство соединения верхней стенки с боковыми стенками кожуха, а также соединенный с каждым указанным средством управляющий блок управления. Причем вышеназванные средства соединены между собой и с управляющим блоком управления. При этом средство гибки представляет собой автоматический пост гибки заготовки и выполнения стенок кожуха. Обеспечивается возможность автоматизации процесса изготовления кожухов конвекторов из тонкой рулонной стали.[6].
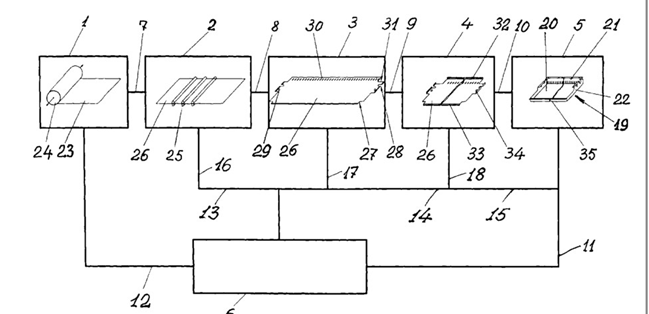
Рисунок 3- Автоматическая поточная линия для изготовления кожухов конвекторов.
Техническим результатом представленной в данном описании автоматической линии является обеспечение возможности полной автоматизации процесса изготовления кожухов конвекторов из тонкой рулонной стали.
Данный результат получен автоматической поточной линией для изготовления кожухов конвекторов, содержащей последовательно соединенные средство подачи полосы тонколистовой стали, связанное с ним правильное средство, которое связано со средством вырубки в листовой заготовке выемок и отверстий, при этом средство вырубки соединено со средством гибки верхней и боковых формообразующих частей заготовки кожуха относительно средней части заготовки, причем средство гибки представляет собой автоматизированный пост гибки заготовки и выполнения стенок кожуха, со средством гибки соединено средство соединения верхней стенки с боковыми стенками кожуха, причем вышеназванные средства соединены между собой и с управляющим блоком управления приводами исполнительных механизмов линии.
Линия для изготовления кожухов конвекторов, содержащая последовательно соединенные между собой средство подачи полосы тонколистовой стали, правильное средство, средство вырубки в листовой заготовке выемок и отверстий, автоматический пост гибки верхней и боковых формообразующих частей заготовки кожуха относительно ее средней части, средство соединения верхней стенки с боковыми стенками кожуха, а также соединенный с каждым указанным средством управляющий блок управления.
Выводы по патентным исследованиям: При проведении патентного исследования выявлены аналогичные устройства, но они не позволяют решить поставленных задач по автоматизации транспортных операций на автоматической линии.
Следовательно, возникает необходимость решать проблему путем создания системы автоматизированного управления процессом межоперационной загрузки и выгрузки рычагов стеклоочистителей.
или напишите нам прямо сейчас:
⚠️ Пожалуйста, пишите в MAX или заполните форму выше.
В России Telegram и WhatsApp блокируют - сообщения могут не дойти.