5. РАЗРАБОТКА СИСТЕМЫ УПРАВЛЕНИЯ
5.1. Выбор аппаратного обеспечения системы управления линией
Конструкция аппаратного обеспечения управления автоматической линией включает в себя:
Два ЧПУ контроллера серии GP-AT 10/510 (GP0001 и GP0002), установленные в сети с персональным компьютером через сеть Ethernet. Каждое ЧПУ имеет модуль ввода/вывода типа High Density с 66 вводами и 36 выводами.
Сеть реализована через Lab, куда сходятся кабели Ethernet от двух ЧПУ и от персонального компьютера (рисунок 5.1).
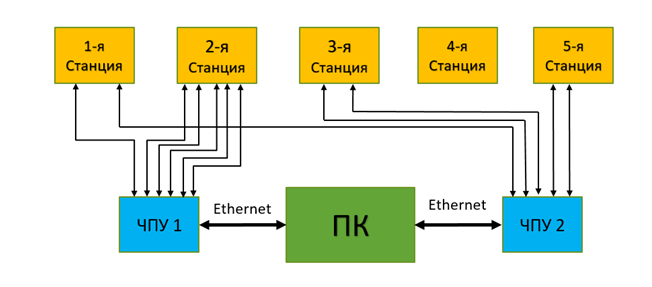
Рисунок 5.1 – Система управления автоматической линией

Рисунок 5.2 – Шкаф управления автоматической линией
5.2. Обзор робототехнической системы
Робототехническая система состоит из следующих компонентов:
- Робот;
- Система управления роботом;
- Ручной программатор KCP;
- Соединительные кабели;
- Программное обеспечение;
- Опции, принадлежности.
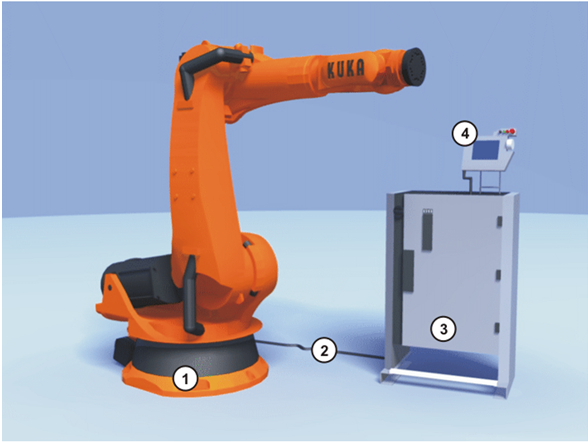
Рисунок 5.3 – Робототехническая система:
1 – Робот; 2 – Соединительные кабели; 3 – Система управления роботом; 4 – Ручной программатор KCP
5.3 Обзор системы управления роботом
Система управления роботом состоит из следующих компонентов:
- Управляющий компьютер
- Энергоблок
- Ручной программатор KCP
- Логика защиты ESC
- Адаптер KCP (опция)
- Панель присоединения
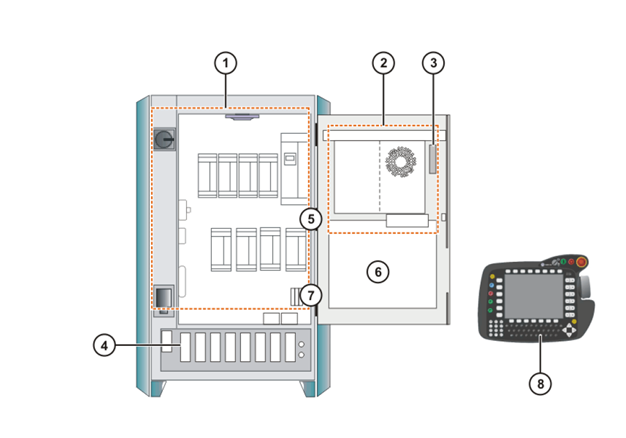
Рисунок 5.4 – Системы управления роботом:
- 1 –Энергоблок;
- 2 –Управляющий компьютер оборудования пользователя;
- 3 – Элементы индикации и управления адаптера KCP (опция);
- 3 – Панель подсоединения;
- 4– Логика защиты (ESC); 5–Отсек для монтажа;
- 6 – Карта адаптера KCP (опция);
- 7 – Ручной программатор KCP.
5.4. Разработка блок схемы функционирования робототехнического комплекса (РТК)
Для разработки блок-схемы функционирования РТК покажем траекторию движения промышленного робота и выделим на ней опорные точки (Рисунок 5.4).
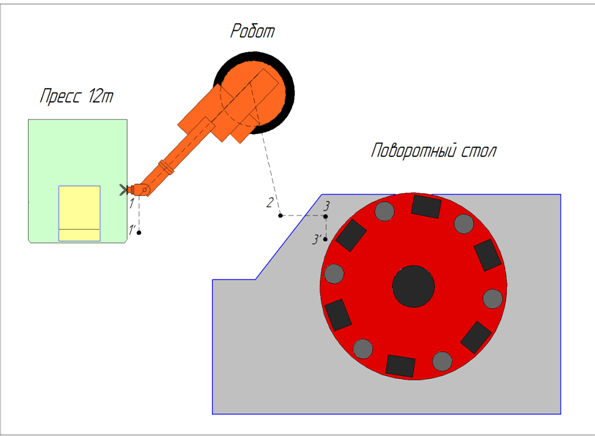
Рисунок 5.5 — Траектория движения робота и опорные точки:
1– Исходное положение руки ПР; 1’ – Опускание руки ПР;
2 – Разворот руки ПР; 3 – Выдвижение руки ПР; 3’– Опускание руки ПР.
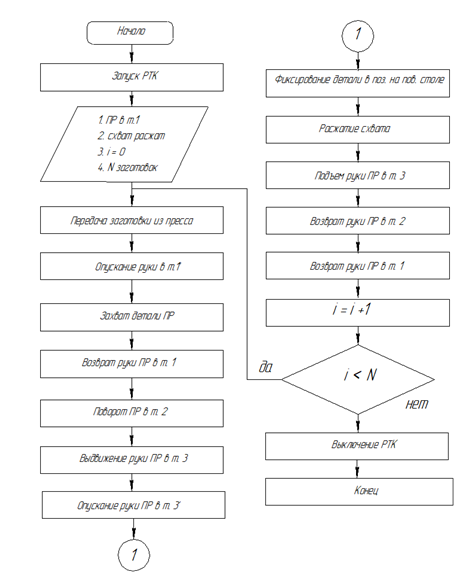
Рисунок 5.6 – Блок-схема работы РТК
5.4. Разработка циклограммы работы РТК
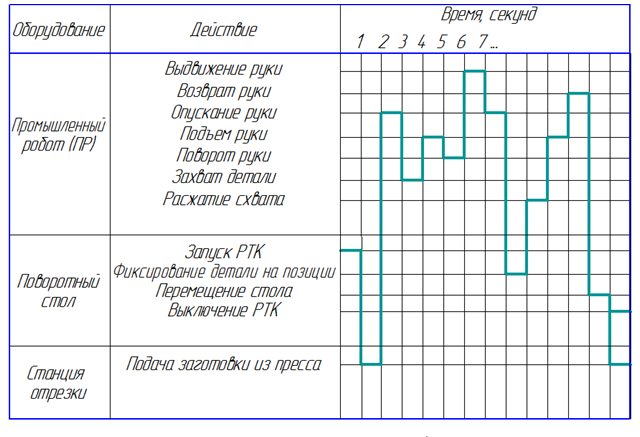
Рисунок 5.7 – Циклограмма работы РТК.
5.4 Разработка управляющей программы для робота
Язык программирования роботов KUKA, также известный как KRL (KUKA Robot Language), является проприетарным языком программирования, похожим на Pascal и используется для управления роботами KUKA.
В робототехнической системе KUKA заданы следующие прямоугольные системы координат:
- WORLD
- ROBROOT
- BASE
- TOOL
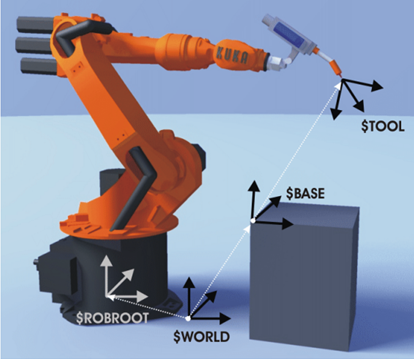
Рис. 5.8 — Общий вид систем координат.
WORLD
Система координат WORLD представляет собой жестко заданную прямоугольную систему координат. Она является исходной для систем координат ROBROOT и BASE.
По умолчанию система координат WORLD расположена в основании робота.
ROBROOT
Прямоугольная система координат ROBROOT всегда расположена в основании робота. Она описывает положение робота по отношению к системе координат WORLD.
По умолчанию система координат ROBROOT совпадает с системой координат WORLD. Посредством $ROBROOT можно задать смещение робота относительно системы координат WORLD.
BASE
Система координат BASE представляет собой прямоугольную систему координат, описывающую положение заготовки. Она соотнесена с системой координат WORLD.
По умолчанию система координат BASE совпадает с системой координат WORLD. Она перемещается пользователем в заготовку.
TOOL
Прямоугольная система координат TOOL расположена в рабочей точке инструмента. Она соотнесена с системой координат BASE.
По умолчанию исходной точкой системы координат TOOL является центр фланца. (В этом случае она называется системой координат FLANGE.) Система координат TOOL перемещается пользователем в рабочую точку инструмента.
Программирование движений
Могут быть запрограммированы следующие виды движений:
- Движение от точки к точке (PTP)
- Линейное движение (LIN)
- Круговое движение (CIRC)
Начальной точкой движения всегда является целевая точка предыдущего движения или, если робот стоит, актуальная позиция робота.
На основе данных траектории робота, блок схемы и технологического процесса, была составлена управляющая программа (УП) для промышленного робота KUKA.
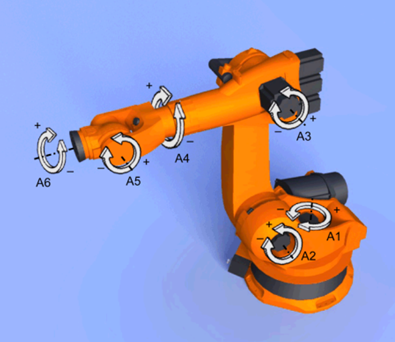
Рисунок 5.9 – Осевое перемещение промышленного робота.
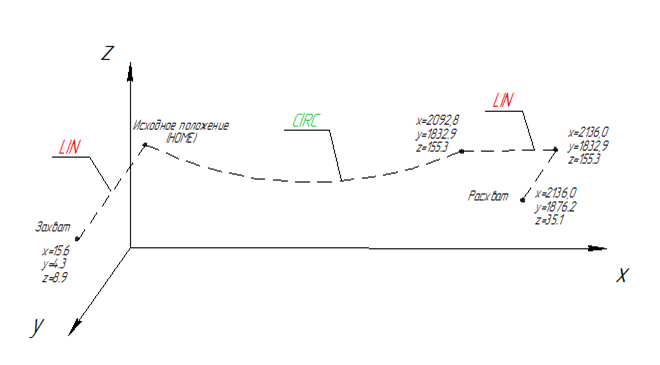
Рис. 5.10 – Траектория и координаты опорных точек в системе координат робота.
УП на языке KRL:
DEF UEBERB_P ( )
;——- Declaration section ——-
EXT BAS (BAS_COMMAND :IN,REAL :IN )
DECL AXIS HOME
;———— Initialization ———-
BAS (#INITMOV,0 )
HOME={AXIS: A1 0,A2 -90,A3 90,A4 0,A5 0,A6 0}
;———— Main section ———-
PTP HOME ; BCO run
LIN {X 15.6,Y 4.3, Z 8,9,A 79.11,B 68.13,C 79.73}
$APO.CDIS=25
PTP HOME
CIRC {X 2092.8,Y 1832.9,Z 155.3,A79.11,B 68.12,C 79.73}
LIN {X 2136.0,Y 1832.9, Z 155.3,A 79.11,B 68.13,C 79.73}
LIN {X 2136.0,Y 1876.2, Z 35.1,A 79.11,B 68.13,C 79.73}
LIN {X 2136.0,Y 1832.9, Z 155.3,A 79.11,B 68.13,C 79.73}
LIN {X 2136.0,Y 1876.2, Z 35.1,A 79.11,B 68.13,C 79.73}
PTP HOME
LOOP ;
PTP POS_1
LIN POS_2
IF $IN[1] == TRUE THEN
EXIT
ENDIF
CIRC HELP_1,POS_3
PTP POS_4
ENDLOOP
PTP HOME
END