6. РАСЧЕТНАЯ ЧАСТЬ
6.1 Анализ исходных данных
В качестве расчетного механизма будет выступать захватывающее устройство (ЗУ) промышленного робота KUKA — KR16 (рис.6.1), которое представляет собой механическое клиновое ЗУ с пневматической системой работы. Захватные губки такого ЗУ выполнены несимметрично, чтобы обеспечивать запирающее действие зажима детали (рис.6.2 ).
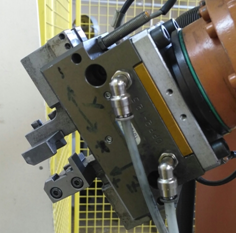
Рисунок 6.1 — Захватное устройство робота KUKA KR-16
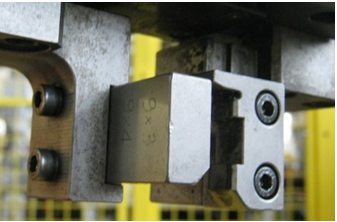
Рисунок 6.2 — Сменные захватные губки ЗУ робота
Захват представляет собой пневматический параллельный механизм для высоких нагрузок (рисунок 6.3). Принцип действия такого ЗУ основан на клиновой кинематике (рисунок 6.4).

Рисунок 6.3- Пневматический клиновый схват манипулятора
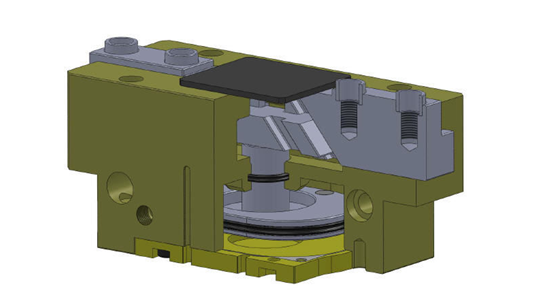
Рисунок 6.4 – Пневматический клиновый схват манипулятора в разрезе
Характеристики пневматического захвата манипулятора:
- Привод: пневматический
- Тип: параллельный
- Количество захватов: 2 захвата
- Принцип работы: клиновая кинематика
- Рабочее давление: 2…8 бар
- Точность повторения: от 0.01 до 0.02
- Ход: от 4 мм до 32 мм
- Сила сцепления: от 110 Н до 3200 Н
- Приведение в действие: наддув фильтрованным сжатым воздухом
- Тип изделий: для высоких нагрузок, для манипуляционных систем, для промышленных роботов, для обшивки, для ткани, для лабораторной автоматизации, для деревянного листа, для робота, укладывающего грузы на поддоны, для укладки на поддоны, для стеклянной панели, для большой детали, для небольшого разряда, для фармацевтической промышленности, для погрузки/разгрузки катушек, для роботизированного укладчика на паллеты, для совместного робота, для тяжелых деталей, для укладчика на паллеты, для деталей больших размеров, для легкого робота, для применения в косметике
- Характеристики и варианты: точный, компактный, самоцентрирующий, большой ход, с двойным эффектом, с повышенной силой сжатия, без технического обслуживания, со встроенным датчиком силы, расширяющийся, с высокой пропускной способностью, внешний, ATEX, магнитный, с зажимом.
6.2 Захватные устройства промышленных роботов
Захватные устройства промышленных роботов и манипуляторов служат для захватывания и удержания в определенном положении объектов манипулирования. Эти объекты могут иметь различные размеры, форму, массу и обладать разнообразными физическими свойствами, поэтому ЗУ относятся к числу сменных элементов ПР. К захватным устройствам предъявляются требования общего характера и специальные, связанные с конкретными условиями работы. К числу обязательных требований относятся: надежность захватывания и удержания объекта, стабильность базирования, недопустимость повреждения или разрушения объектов. Прочность ЗУ должна быть высокой при малых габаритных размерах и массе.
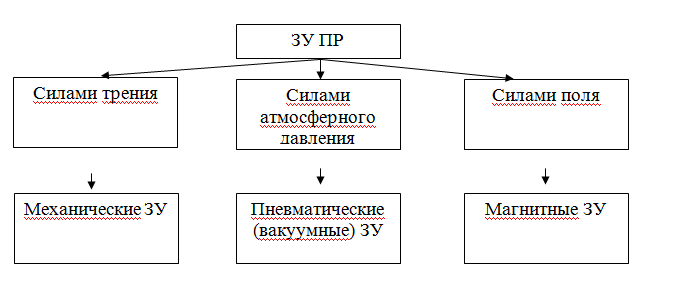
Классификация ЗУ ПР.
По способу взаимодействия с объектом манипулирования:
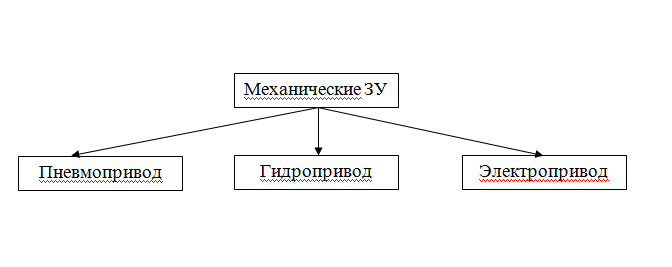
По типу привода
По типу передаточного механизма
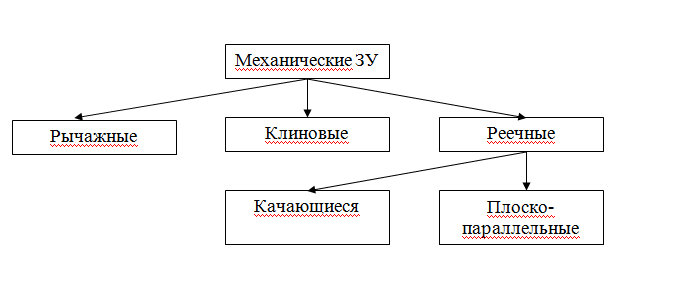
В данной ВКР рассматривается принцип действия механического ЗУ с клиновым ПМ.
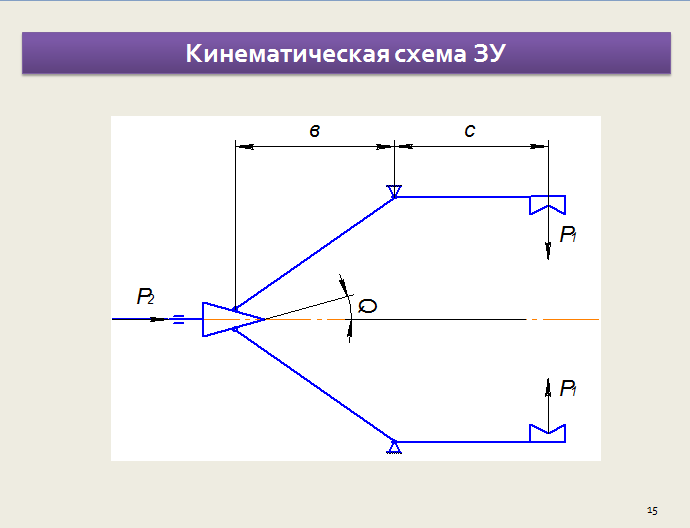
Кинематическая схема механического ЗУ с клиновым ПМ представлена на рисунке 6.5.
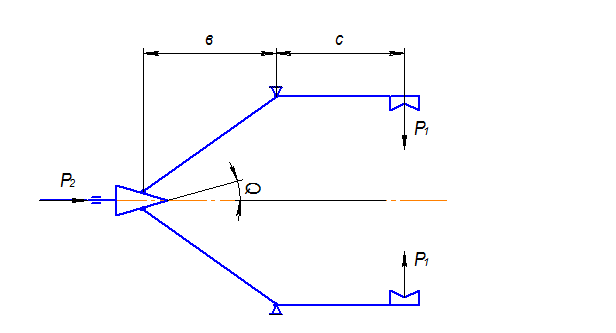
Рисунок 6.5 — Кинематическая схема ЗУ
6.3 Определение усилия зажима
а) При вертикальном линейном перемещении
k – Коэффициент запаса, k = 2
G – Вес детали, G = 0,74 Н
f – Коэффициент трения губок, f = 0,15 (губки нерифлёные)
aв – ускорение вертикального движения, м/с2
g – Ускорение свободного падения, g = 9,81 м/с2
— скорость подъема максимальная, = 0,6 м/с
Δt – время разгона, Δt = 0,2 с
б) При горизонтальном линейном перемещении
аг – ускорение горизонтального перемещения
a — угол центрующих губок, a = 45º
— скорость подъема максимальная, = 0,8 м/с
в) При вращении ЗУ в горизонтальной плоскости
R – длина вылета руки ПР, R = 0,8 м
w — угловая скорость вращения ЗУ, w = 1,57 с-1
e — угловое ускорение поворота ЗУ, с-2
г) При торможении всех трех движений
д) Эмпирическое усилие зажима ЗУ
– масса заготовки, кг;
– ускорение свободного падения, g = 9,81 м/с2;
– коэффициент запаса, = 2;
A – максимальное ускорение, действующее на деталь, м/с2; (≤4g)
коэффициент, зависящий от расположения губок и формы поперечного сечения детали.
Следовательно, :
Выбираем максимальное усилие зажима P1 = 16,38 H и по нему ведем дальнейший расчет.
6.4 Определение тягового усилия пневмоцилиндра Р2
усилие пневмоцилиндра, передаваемое передаточному механизму, Н;
Р=0,6 МПа — давление воздуха в системе, Р=0,5-1 МПа;
S – площадь поршня, мм2
d – диаметр поршня пневмоцилиндра ПР, d=25 мм;
Получаем:
6.5 Определение силового передаточного отношения механизма Kр

Рисунок 6.5. Кинематическая схема ЗУ
Силовое передаточное отношение рассчитывается по формуле:
Р1 =281,02 Н — усилие, необходимое для удержания заготовки;
Р2 =294,375 Н — усилие, передаваемое от пневмоцилиндра передаточному механизму;
Получаем:
Примем: с=80 мм, θ=15°
При помощи формулы по рассчитанному силовому передаточному отношению определим :
Получаем:
6.6 Расчет сил, действующих в местах контакта
Силы, которые действуют в местах контакта ЗУ с объектами манипулирования, вычисляются по формуле, приведенной в таблице 6.1.
Нахождение сил, действующих в местах контакта деталей с зажимными губками, сводится к определению минимальных сил, которые действуют в местах контакта, достаточных для удержания заготовки.
Схема рассчитываемого ЗУ:
- деталь удерживается благодаря запирающему действию губок [13].
Таблица 6.1– Схема и расчетная формула
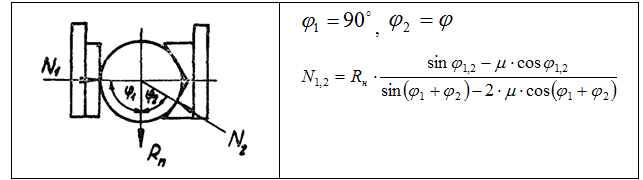
N1,2 – усилия контакта между деталью и губкой, Н
Rн — реакция на губку захвата, Н
m — коэффициент трения, m=0,15
j1,2 – угол контакта, j1,2 =45°
ЗАКЛЮЧЕНИЕ
В выпускной квалификационной работе, в соответствии с заданием, проведены патентные исследования и обзор научно-технической литературы по системам автоматизации межоперационной загрузки выгрузки рычагов стеклоочистителей на автоматической линии. Изучены существующие способы и устройства для создания систем управления технологическим процессом.
В процессе выполнения ВКР был разработан робото-технический комплекс для обработки детали. В качестве механизма для автоматизации транспортных операций была принята автоматическая линия, к которой был подобран промышленный робот KUKA — KR16, который благодаря своей маневренности и степени точности отлично подходит для данного техпроцесса. Проведены расчеты захватного устройства робота. Это позволило автоматизировать процесс межоперационной загрузки и выгрузки рычагов стеклоочистителей с одной операции на другую, увеличить качество обрабатываемой поверхности и сократить время на обработку.
Учитывая все вышеизложенное, представляется, безусловно, целесообразным внедрение данного промышленного робота в производство, с целью повышения эффективности работы.
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ
- Автоматизация производства / Википедия // URL: https://ru.wikipedia.org/wiki/Автоматизация_производства (Дата обращения 18.04.2017)
- Манипулятор / Патент РФ № 2410235 // URL : http://www.freepatent.ru/patents/2410235 (Дата обращения 18.04.2017)
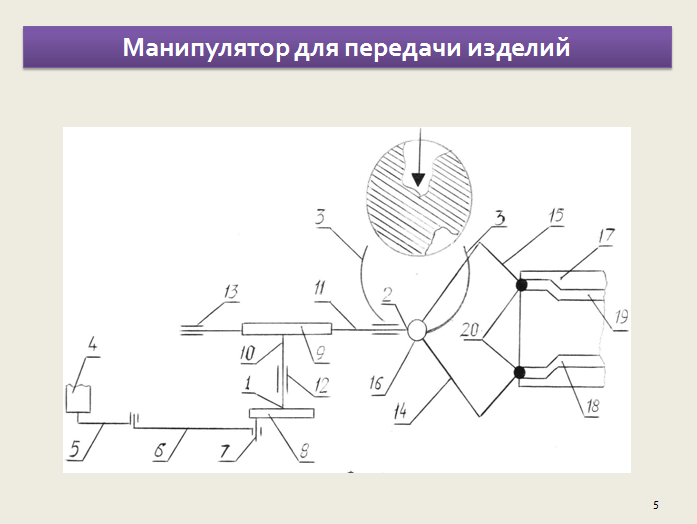
- Манипулятор для передачи изделий/ Патент РФ № 2521933 // URL : http://www.freepatent.ru/patents/2521933 (Дата обращения 18.02.2017)
- Устройство для загрузки заготовок в пресс / Патент РФ № 2399468 // URL : http://www.freepatent.ru/patents/2399468 (Дата обращения 18.05.2017)
- Загрузочно-разгрузочное устройство / Патент РФ № 2486041 // URL : http://www.freepatent.ru/patents/2486041 (Дата обращения 18.02.2017)
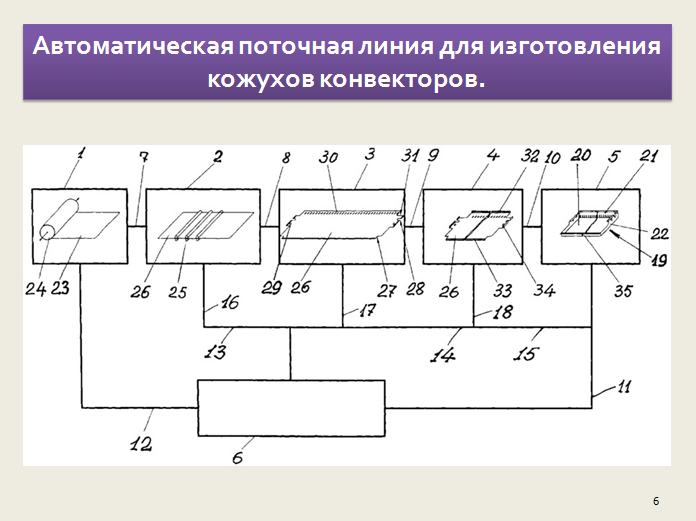
- Автоматическая поточная линия для изготовления кожухов конвекторов / Патент РФ № 2488474 // URL : http://www.freepatent.ru/patents/2488474 (Дата обращения 28.05.2017)
- Промышленные роботы / НАНО-портал // URL: http://fiercest.ru/referaty/lektsii-po-kursu-promy-shlenny-e-roboty-dlya-studentov-spetsial-nosti-avtomatizatsiya-tehnologicheskih-protsessov-i-proizvodstv/ (Дата обращения 03.05.2017)
- Автоматизация производственных процессов // Машиностроение, механика, металлургия/ URL:http://mashmex.ru/mashinostroenie/110-avtomatizacia-proizvodstvennih-processov.html?showall=1 (Дата обращения 03.05.2017)
- Робототехнический комплекс // Автоматизация производства / URL: http://www.automates.ru/robots/38/259.htm (Дата обращения 03.02.2016)
- Схема процесса сварки плавлением // Оборудование и технология сварочного производства / URL: http://oitsp.ru/welding_article/shema-processa-svarki-plavleniem (Дата обращения 03.02.2017)
- Промышленные контроллеры /ОАО «ПЛК»// URL: plc.ru/index (Дата обращения 25.05.17)
- Романов В.В. “Методические указания к курсовой работе по автоматизации производственных процессов в машиностроении”.
- Козырев Ю.Г. “Промышленные роботы” Справочник М: Машиностроение, 1983, 378 стр. (Дата обращения 25.05.17)
- Техническая документация на автоматическую линию / Руководство на машину Wiper arm / Италия, 2008г. (Дата обращения 25.05.17)
- KUKA Roboter GmbH Zugspitzstra 140 D-86165 Augsburg Германия / Инструкция по эксплуатации и программированию / Для конечного пользователя / Для программного обеспечения системы KUKA V5.2, V5.3, V5.4 / Издание: 21.07.2006 / Версия: 1.1 (Дата обращения 25.05.17)
- Захватные устройства роботов / Параллельные клиновые пневматические ЗУ // URL : http://pdf.directindustry.com/pdf/omil/opp-2-finger-parallel-grippers-pneumatic/39632-700647.html (Дата обращения 25.05.17)
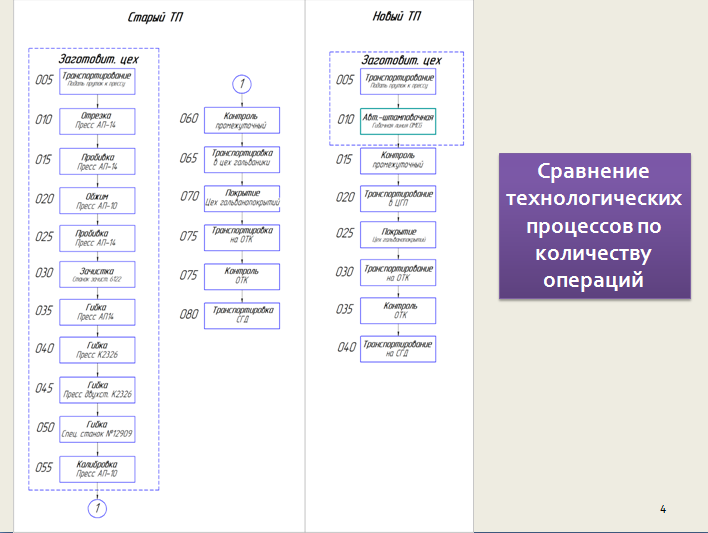
ПРИЛОЖЕНИЕ А
Базовый технологический процесс гибки рычагов стеклоочистителей
ПРИЛОЖЕНИЕ Б
Новый технологический процесс гибки рычагов стеклоочистителей